API测量解决方案助力博士团队开发高强度雕刻机器人

上交大-耶鲁机器人开发博士团队
使用API-Radian激光跟踪仪标定大型机器人
精英团队:该机器人开发精英团队由多名上海交通大学以及耶鲁大学毕业、在读博士组成。其开发领域是面向大尺寸、高强度的雕刻机器人领域,包括硬件以及机器人控制软件系统。该团队的研发能力在国内处于领先地位。此次需要标定的大型雕刻机器人,其雕刻强度达到了165千克。该开发团队的实验室坐落在位于中国山东省青岛市的株洲路上,这里云集了国内以及国外各精英企业的工厂及研发中心。
合作背景
由于团队开发的大型高强度雕刻机器人应用于精细雕刻领域,所以其对标定精度的要求也极高。此次测量,开发团队希望:
-
对机器人各轴的运动轨迹进行全方位标定,并进行精度补偿;
-
得到各轴轴线的终端坐标,用于进一步开发其新一代大型高强度机器人控制系统。
通常来讲,对于大型机器人的标定本身就具有一定难度,而此次待标定的用于精细雕
刻领域的165千克级7轴联动高强度机器人的标定还同时要求比一般大型机器人标定更高的精度,这样的条件使该团队犯了难,并四处寻找可完美解决此问题的测量解决方案。该团队的负责人在研读了API公司丰富的《行业成功案例》后,邀请API公司为其提供高品质测量解决方案。
机器人各轴运动轨迹精密测量与补偿
该待标定机器人属于7轴联动大型雕刻机器人,因为其轴数较多,结构较复杂,所以要对该机器人进行标定就必须先要确定其每个轴的运转是否正常,再进行统一联动状态下的最终标定。

待标定165kg级机器人7轴位置示意
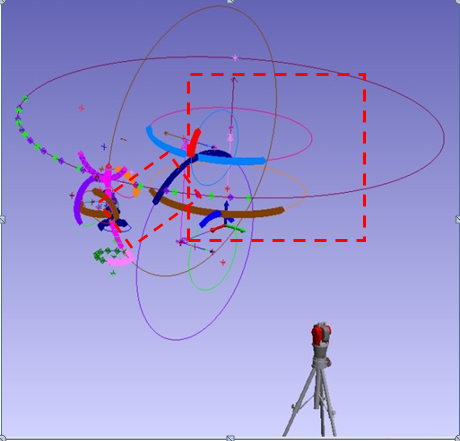
对于该机器人每个轴的运动轨迹标定,API工程师将使用Radian激光跟踪仪分别在机器人每一轴转动时动态扫描取点,Radian每秒3000点的取样速率可在有限运动路径中记录下众多运动轨迹上点的坐标,随后用众多点的坐标拟合成圆,并计算出圆心,将每一点与圆心连线,从而得到各线段之间的角度关系(见下图)。随后,API工程师用Radian激光跟踪仪测出的角度数据与机床操作系统中显示的角度数据做比对,计算出机器人的减速比调整值,最终在控制系统中进行补偿、提高机器人的精度。
![(~S05BV8_$R)]TJ3Y2}73LM](data:image/png;base64,/9j/4AAQSkZJRgABAQEAYABgAAD/2wBDAAoHBwgHBgoICAgLCgoLDhgQDg0NDh0VFhEYIx8lJCIfIiEmKzcvJik0KSEiMEExNDk7Pj4+JS5ESUM8SDc9Pjv/2wBDAQoLCw4NDhwQEBw7KCIoOzs7Ozs7Ozs7Ozs7Ozs7Ozs7Ozs7Ozs7Ozs7Ozs7Ozs7Ozs7Ozs7Ozs7Ozs7Ozs7Ozv/wAARCAFhAc8DASIAAhEBAxEB/8QAHwAAAQUBAQEBAQEAAAAAAAAAAAECAwQFBgcICQoL/8QAtRAAAgEDAwIEAwUFBAQAAAF9AQIDAAQRBRIhMUEGE1FhByJxFDKBkaEII0KxwRVS0fAkM2JyggkKFhcYGRolJicoKSo0NTY3ODk6Q0RFRkdISUpTVFVWV1hZWmNkZWZnaGlqc3R1dnd4eXqDhIWGh4iJipKTlJWWl5iZmqKjpKWmp6ipqrKztLW2t7i5usLDxMXGx8jJytLT1NXW19jZ2uHi4+Tl5ufo6erx8vP09fb3+Pn6/8QAHwEAAwEBAQEBAQEBAQAAAAAAAAECAwQFBgcICQoL/8QAtREAAgECBAQDBAcFBAQAAQJ3AAECAxEEBSExBhJBUQdhcRMiMoEIFEKRobHBCSMzUvAVYnLRChYkNOEl8RcYGRomJygpKjU2Nzg5OkNERUZHSElKU1RVVldYWVpjZGVmZ2hpanN0dXZ3eHl6goOEhYaHiImKkpOUlZaXmJmaoqOkpaanqKmqsrO0tba3uLm6wsPExcbHyMnK0tPU1dbX2Nna4uPk5ebn6Onq8vP09fb3+Pn6/9oADAMBAAIRAxEAPwDmH8OyL/q7gH61Wk0O8U8FT+NdUyg9RUbRjHQVjzM0sjj5dMvU/wCWOaqvazr9+A4+ldnJHxUDRj3p8wrHFSRAfeiP5VXaOMfw4rtJoVbORn6jNZl1ZRGNjsGcHHFUpC5TmSifw9a07GIFVwMk1SYD0rU0/mJRTewkaNvEB1PPtV1cZ2ZGfQVLpFkLy8ht/wDnq4X8zXo3inwnpumeGYzaQBXgkHz92zwc1na5oeRa0mBEfc03ShmGYe4q1r8eIojj+I1V0t1SOfJ54IFV9kn7ReiTmrcYqtAd0anuRVyOpGX7Bts6HpgivbozujQ+qivDI224I6it648X65eKF+0LbRhdu2IckfWqTsDVzV8eTxSaosasCyIA2OxrjmxmnuzFmLSM7MclmOSaiJFS9WMr33NnLj0rm1+5XSXbZtpB7Vzqr8pq4kSNmIgQQn/ZFWA4wOax2vVSCMZxtGCTwKUXVzNxFEx98YH5mlYZo3t8bW0klXqo4rnTM9yTKzFieuau31peNYSyyFQAM7ckmsyAlY+RyaaQGjpP/IViAYrkEZ/Ci9vHguZFYznYcbw+A3vV+w0aeC7huJWUDGSnfkVlareO7vbLt+zwsUjXnB9/woWoDxqzzkM1xcsQcfNJnH51opqdqtuVI3SAYLyMc/gBxXN+dLJIXlZSx44GKfJhgDnOT0FVYm51+gzpcalAcANuPAOe1egwx8DivLfB1s41i3k4CK+M+5r1qJOBxUT3BAIg5RGztZgGx6VZghso/wDUwY9SvB/PrQi/PH/vj+dTR2+z5u3Xisy0XWtrZYQ6wL5hHymQ7j+tWLfzARvJxtFPu4FS1j2jlCMe9SRrlQD6VVtRX0LMYwtOoHApa1WxAUUUUwM/U03NF9D/AErxrxauEkH/AE3P9a9pvsEp681474wQLFL/ANd/8albjOKkHFdD4CP/ABPJV/vWzfoRXPyjit/wJx4iX0aBx/I1T2A63UhgGsoDkVtamvBrJA5FZFEkQqwFqOJasKtADCOlNI4qUrTWWgCAimEVMVphGe1IZAR1pmM8VMwqNxgE+goGjgrxt+p3TZzmQ/zp9knmXsEf96RR+tVyd8sr/wB5if1q/pC7tVth6Pn8qHsenTWyO0kPzGoHanu1V5DmvPPf2RG7c5o/gBqNutSt90V0UVqeTmUvdSNFkqJkq3sJzxXI+L9bktX/ALPtm2uRmRh1we1dCR4TZfvta0+yO2SXe2cFY+cVTOuWryrGIpQH6NjIrlLV4o23MPMc/pVy2vi0znyQwx+Q9BTtYSZ0++OTOxgcdR3qrOmUb6ULHBPpSajabxMX2N8uCn19qbFc+bBmVPLkyQy/1pWGcqw6+xrU0sZjH1qndW00LkGM8nioYruaBkAOwK2a0eqJR33h+RItVtWdgAJVPJ969Z8YyRHwzcOXXaCpznjrXztLfSC8juN23aRg47V002qSXFpJbNK33BlSeKnZFWuVteQyWylAW2vk7ecVR0blp1PoKu6LeA+WjnuVb3q3qNqtvE88JVW7kL1FJbWE97kHC+wFSQzwuPlkU496zZY5LqPmY7COQOKgGkxlBH5pUA/jQB0Syp/eX86sB1xncv51yZ0iFely4P1qN9OUf8vT/wDfVFkO7OmmvIlJG7OBnA5qMys3RkU+mdzfkK5drIowIuHOO26kT91N5ikZ9G5FOwXOpltJ2haRlfCjJLsF/wDHR/jWAXCIzNwFqSTXr54zGZl2kYICisuSeY/KTwfQU1oKWpp2urWrBYRbksB94nrU41mQTKPIRIu5zk1gSho5UdexGasSSqCSvShoEa93rsM9pLCIXDMMZJFZUbqJFaQEKDzgZzVeU7lIpm/5Qu459KaQHWJrE8yhrayklVeAWIFTr4at9XdppLiSB2O8qAOM9qytB5iYEnrV7UL5rSKIpN5W7PJXdmkBoQ+ALTcC1/MR6BQK1JPCuk2ekOBbCV0GRJJy1ceNfuh01Af9+qlh8Q3TOFa/RgOSDGelFmLQ3dLhSHUrZY1Cr5o4FeixJnFeaf27ZR3tvcrEcIQzKrDLe4FemaZcRX9lDdwHMcq7lz29qmSAm2YCk9mH86vIYgyFmVRjufeo/s/nRlN/lk9GxnH4VJb+HYI5jNJIZGJzjaMfrmpSbGSnU7XzGSSZXC4wFG7+VINWtkICpI7eu3H86sjSrQHJjLHOeWOBU8drbxfcgRT6hatRYroW3lM0IkKlc9jUtJRVki0UUUwMi6D/ANuKNxKGE4Ge+a8t8Zr+7n9Bcf416zcLnVYjj/lkf515Z43Talxj/n4/xqVuM4KXpXQ+CF26tbSeszRn8Yyf6Vz8o4NdJ4PG1Fl6eXfwc/7wZf61T2A7DVVwDWPt5Fb2rpwaxcfMKyKRLEuasKtRxLVlV4oAi20wrVjbTStAFVlqNhVpl5qIrQBWYcVXujstpX9EJ/SrjL1rP1c+XpV03pEaClucBH938a1/D6htVQn+FWP6VkR/dFbnhld19Ix/hj/maiekWevRV5pHSOOOBUDjFTSHbnFVpM+tcKPcsRnlwPepmXNQw/NMPYVYauuktDwMyl+8SOgEFeR+JGY+IbzfnIlIr2vyxXmXxD0V7XURqkaEw3HDkD7rj/GtovU8hnIwsq5ZvWtawVU/esM7jjHtWSm0ZYnr1Fa1mwPlg8jFVIEdXpN/DFfhkULBNhSnYH1qvr13bW2ryxRgYz8wx91sc1UjKhQF6U3xQgnktyGCyhP3jdSeBjNQt7FMp3N6rqRkEDpWPMVYkn7ue1NnjePAEoaocOSA3T3q0rEtm1cR2o0iKZZP9I4BBP8ASpInLEFpBkp071kSviJV9sHFXIXXKMTyBgUrWNISsy3YMFuH+criTIxXS6jLG1hKN2flyK5O3VndpEPVuBV+7lnMRVsKMdzQQV42WLLZOH5IHf2+lOa6yc5qqZZUQcqRioWmbbvIOM4zinqwLM0vmYIbaR0NQ52jbuBGeD6VCZs9j+VNM1AiRm4IGOR19Kgbdn7/ALdaRpfT8aZv/GmAoyG696kEo9eai3jHSlQbu4pgSStuXduofp17CmSELgDk96az57ZFFgvqPBzxUZH70Cng0qkEdMmgDoPDgyr9OtS+JcCC3yP4mqjoNxFA8jTHaABjNW/EM0VxYRTxuNquRz3z6UuoGFuAp8ZyTgc4qJkkV1G04cZU44NaFppVzcRiRAm09ywFWSRMQJEycMF5rufC2v3+n6RHBCwaIMzDKg/zrkH0q6inRHVZPMOAVYHH19K6qzjjgsoIXZQwXGAaV7A1c6VfGF+B8zAdP4B69675NTeS3imhiEqyLkMjZU15L+624yoAq/pHiGbS5FjjupPsu/8AeRIQPxGRTU11QuV9Gd9q2v3WkQrNJarIh9CRiufPxGnEg/0SLb6ZNb6WkOt6cskOrXE9tNx0Q49unBrndQ8CWML/AC3VxyeCSOK2jOlb3kZyU+jLSfEQHlrNf++qsQeOvtEiolqoLHGS1c8/hO3iHF3MRjnIFZvh1RLq8EchJQyYI/GrSpyT5UJOaep7CjbkVvUZp1IAFAA6DpS1ymxSmGdUgP8A0zavL/HabUuv+vn/ABr1OQf8TCE/7DV5j4/XEd3/ANfP9TS6jPOZO9dL4TGdMuj6Xlr/AOh1zcg611Hg8btKvu3+lWn/AKNFN7B1O41mM4bisIqQa6nWI8bq52VMPWQ0LEtWkTioYVq9EmRQBF5dMMftV3yqa0fSgCgyYNRNHk1ekjyOmTmoWj5FAFCRCOg+tZHiU+XoVyTxkAfrW/KmAeK5vxk2zQsd3lUUGkNZI4lF+UfSuh8MJh7iT/ZArBQcD6V0fh1dtnK395/5Csqr9xntYVXqo1XOarSNUzmq0rda40ewyS0XLMfQVYZeKZZL+6J9TU7rXdTVonzGMlzV2bd9rmm2Ckz3Kkj+FPmP6VzOt+JrfUrKexFqPKlXG6Q/kcetZuvaRdafKLeS4Vg6hsqvvWC9jMWGZCQTitEkcGpkyQeU7IecHGc9at2FyY2MbKT/AEp9zbGNlDjjvnvTlkiFwyRxq6LwrjIyKbBI1ILiLP8AFk9qNWhN2sdxER85IY564oOn3EtmJbSBpyRnaB0HrUluk0dpFFcJtY5YJ/dFR1LcWt0ZH2DaPmYHPpT1s06Fc8da0Zo+4GKjOMVVybFJrOGQcj7vTFBs0VchmqyMAkeopcAqRimFifQ9MjuYrt2lYNbYKgD72a3/AA/Z21wJvtEKS4IxvGcVmeHWIt9UA64j/rW9oAXMm3uOa6XGPsb2ObmftbGh/ZWnbmH2GDH/AFzFQxaBpML5jsogSOpGea0uN5+gpSMOvpg1yHSVRpenjA+xW/Xn92Kd/Zen8/6DB/37FWgPx56U/bhSB0oAzpND0q7ULLp8JCnIwuP5VLFoulwIFj0+3AJ6eWD/ADq+Fwv4dqVR0o1ApjRNLY86fbH/ALZio7vw9pd3atAbKFR/CY1CkHtyK00WnhRg4Hc0AePy+D9fS6dDYSEKT8y8g/jSSeFtagiaR7CVUQZY46V7GB1HvUgXBP4VV2I8NXSL+UfurSdz/sxk/wBKWbS76xKrc28tuWGVEikZr3YAj24qlqukWutWb2l0nBXKOB8yN6ii4HicVqJXCtNhmOMGujt9OMkEUMhXZF0471ma1pFzod81tcr7o46OPUVb0jUfMYRTy9B8pz19jTYGiukWsrbiqkjjOKkXSLbpgfTFRHUooM5cY7g1Rm8VbJNlvAJCehPSgRux6ZBGDt+Ud8DFL9gjx8rHHaqPnag1s0rKokflU3H+VXbWe4hiU3sHkA8bg2VH40mMlSxRRyzEU8WUJ/vVaA3DIpwFAh+m3t5ojGTT5yCwP7uQZQn1x6+9aZ8S6tMoNy0Uje0eAPyrNC84xTkT5sdqBl9dYlfAljXDcfLxWfo9nLZa7arJghpAVYdDzVpI/birNrMDeQxqu8iZc+q89a0pzcXbuJxTPSKWiikIrSD/AE6E/wCy1ea/EFcQ3h/6eB/OvS5f+PuD/gX8q83+If8Ax73n/XYfzpDPM5O9dT4LGdLv/a5tD/5FFcs5611fgn/kHXw/6eLT/wBHCmwPSdaj4Nc1cLhxXWawBnpXMXYG8VkCGwLWjCnAqlAtaUC8CgY8JwOKYycCrAXpTWXj8aYioyAH8ahdOlW3Xmq7jpxmgZTnTg8Vx/js7dOtU/vzH9BXbSjIIrhPH7Yaxiz3Zv5UjWl8aOWXpXS6GMaZn1cmubHSun0sbNLiHqCf1rCs/dPcwa/efIsuaqyH5qmkP5VA3zNjua5UepLQ0rddkKZ7jNSyjGKcq4wOuFxRJyPxr0YqyPkKkuabYnjSPD2z+xB/OuXZc446Guq8Zzo0sManLLkmuL1a8eztlaPAdmwCRQYoo6rMxuPLVT8o5OKrqGjG4ICevSr+godVuLhrlssoBGOK2zpUKcs5Cj1PSmyoytsbfgeCe/a3gKrEs0bwh/LLbRjPr7VhXcE8V06Sq37p2iDbSAwB61q6Jr8unTLHpuox70yQnysat6lfXmroovZRJsYsMKF5PXpSsXKpKfxM5O4J28KcZ64qsw5/Gp9e1RrG4+xEFoWCyADselMYDj5lGQDjPrRYzK5zQM/jUnksW64puwq2O9MDc8HNbi+vIrj7ssS8Hp3zWtpUK22r3ccQYRFVZN3pXN6JcQWupM14m+Bo9rY6jnrXUWk6Sau6wyBrcQDy8HPfv+ddiT9icra9qjYAy5+gpzEAjgnAPQUiDDfVakAyV/HNcR0hH8yhsEE9jUh4/wAKFBp4HWgAA4pcdO3NOVc8mngUAIo/nTscH60oFO28n60AIqnLf71PUcn2xSdGb6/0qReWP0FAxwx+lKPvfhQBg/hQOHB9qBGXrmiWmu2DWtyuDjMcmOUPrXjeq6VeeHNRe3uIzsz1HQjsRXuztzj2rifiLpc09nDqcMRlS3BS4jHXYed34GrTEedylpFEgfch707SNrajCGjaQb/uqMmqkU6W8xWImWBuoI5FWLS8XTtWiuoiWjDcjHY9RTA7i0j8+EzHhnJ/4COwpY5riO4Mcpje2cbJFK8Y9fwqpazyLC0sO5raQlxgglOehq1AGdQz8l/urUjLen3kM8CmKQOo+XI9qtCZNxywGPetXwzp2jyxi0vbKNrlW3RseN3tXWSaPpioRHp1ru7bo+KAOD80dWOMUq3CMQF5961o/CdvLftHqMUYVx5ixxErwGIAHPA5/lTdU8EaVIN1s09s3+zISPyNAyi1wUhZgQSOcVZ8OXdvJbPJdSASvKdgAwwx0OawZvCesQhVint3Mbbo3UlWP1zUVpd285cM3kXQyrKHxk+tFn0BNHr+l6xb6hCgDYlwMg9z7Vo15V4b1IvaLNNIFbHPbnOK9E0fUBeQbWbLr39RTTE0W5R/pMB9z/KvOfiMALS89fNX+deizsFnhJOBk5P4V5z8RXSTT7x0YMpZSrKcg8imSeXseDXUeCJAsUyE4D3doD/38z/SuUJ4p0OoXGniN4HwPMVip6MV6Zpj6nu2rXccn3WBP1rAuDnBrhtO8TXV1MA3HPPJrqLe8acDdUDsatuK04egrMt+QK1IOgpCJxnAprcj05p44/Omt0piK7j8earyHpU7nDBduPeoJCAR9aQyBuQ1eeePm3axaR/3Yc/mf/rV6E5+9XmnjR9/idlz9yJR+mf60G9BXmY46V1lsvl2UC+iCuVAzgetdYfljVfRQP0rlr9D38CtWyNzTYF33Ua+rUOafp43Xmf7ozWMFqjrxEuWlJ+RqAjJ+lNkPTNO43N9KinLAZUZOelegfImDe63DqtyTHDIjYySzA5rE1wb7NXBzscE1MYUttT+zxsSxjJyaJoLhgVZgyEdKb3IWwzwif8AS7geqD+db2pW0l1aSRxnBZeDWOlh5ap5RZJWHzEHH8qfeNcW8UY81weM/MeeaGMoaboupJqUDfZzAsbgtIT1ANduSG+lYbSSC+dd52mNGAzSeY4mHzNjB70mwRl+LbeZ9SjMSM/7nnHbk1P5bTxQtJKQVVcqFHBAA/pT7nc7szEnHqaYMgU7gO5WTr1FMnGOc80ucuMntSSgbfekMgDEyhfVa6LwoT/aTqehiOPzFYNrF512q/7BNdB4fXyta29MxmvQg/8AZ2cU9KyOx2/MpHp/WnrjeMkD2zQoztHsaz4JHjub65XmZIDgYz91jivOtc7DVAXb95ceuaeCo6sPzrjz4l1w4CWzEt28pat2+o+KrghRbxqT0DbFNVysV0dOhXpuH51KAMdRn61nadpfi69JO63iXudyf0FGpWXiXTGjWfVbVWkOFXv/AOg0crC6NEbf7wpcfNw3euVuNR8R25bOoRkD0x/8TVO38R64ZT5l6QvTIx/hRysOZHamLMhYbsj6+lOU7XOeBjrisS8ufEdl4dS/a7cJNKuyTjkYPGMe1YP/AAkmtc7r9jn1/wD1Uco7nfedDgZkUZHHNKMBgd2RjriuAj17VJJEjN6QGIHPaunvLXVtOs7SeTVmcXLIuACNu78faiwXNcxlmyoJ+gNRvHFIrQyjKSKVZSDyD1qh4jtNR0LS1vRq0s5aQLtyy9QT6+1cfL4t1NEL+dIT6GVv8aEI4vUNJOlazdWJODDLhcjqvY/lRexxvak71DqMgU7X7y8u9QbULiQyNKAAxOcAdBWO8rvyzE1VgOy0rT9PudIiuZp5FRuWQPgAj1rT0vWbe61NNPsLSSVhwGHYdzXPeHYIdSszZLIY5EbcwJ+9710Nj4Ut7W5+0LdyhmGCE4yPrSZULX97Y3545becorbZImyGVuhHoa7PTNTXUbNJlY71+WQHqG71xiRqu1UGFUYA9qsafeS6dd+ZGCyH76+o/wAaQtDq75dt1bXmcGMmNjn+Fv8A64FFwePTmmTMt7YsI2BWVPlbHQ9qgtzdHT4ftyotyFAlCHILe1AiKY4I+teV3DI2oGEE5ecgkdRlscV6lN1FeUYX+3CXbA+08n/gVdmFSfN6GFbodO1jceE9bbSb8k28pL207DhgfX/PBrr9PumhYNG2CuOAau+KNKHiTSzZusDSR/NbziTBVsfyNcNo2ozw3Umm6g5iu7c7Tn+MVx3uzpsei3OpS3MSFY8sgbeAcEjHauB8USM/heYsjJjaNrdVw3SukFySqkciud8WIqeGbra+8ZHPcfN0NLqJ7HnJbio5uYV/3qC3y1JDE9zJFAv8ROT6Vp0EtybSGxcn613OnSAgc1xEVtJa3ZVRnntW9b3U9nbGdoy6oMsF6gVDKZ3Ns44rUhcBRXBWviuDAYq4U98Vq2/i+wx8zsv1WkTZnX7+B9aa7Db9DXNr4v0phhrkKc91NZ+o+NWSbZYeTNGcfOc0wSZ0zzgS1FLIu881wd/4sv4y7QvCXU9xgCsweNdUkZRJJFnPO1etCKtY9JMmd1eX+JZPN8U3jZ+6wX8gK6iw8Qecg8zGTXGX832jWbyb+9KSKTN8OveCAbp0HqwrqZDya5qyG67hX/bFdG+TmuSvuj6DArRkLmrelD5pH+gqm9WrB9kRyeppUVeQswny0H5l3dl2z+FEhw+c8VXa4UE+1I9ypIGcV2HzRlXA0e98u+07eZclCWJ/LFRFSFORjjvVaSO1guEFhDLFEG3EM5YZ+uKnDq6ndJj8KHqK1h/8Sk9RUGq82oPvU4eMFQX4xzx0qvqEsb2pVDnHQ4oQFhubqJv71sv6U9ITJcIAQMqapQ3DSTQ5x8sZUY79KuW7lZ4T9f5UnuCGXFuU37nBJHQVUO0AdenNWrufc546iqLnIH60xikqGU4NOn2lAygj61GOoFPmIMfHagCG3cpdRsDglWFdL4eCyamjMTuKsCfwrlH+Romz3Ire8LT/APE6hXPXd/KvRpK+HZw1Hasj0IEfIPY1noAJJ2yc+TL+jVe5wmOvP8qoouHnbq/lTj/0GvOidjMdFvJlWSCLKkY4NSA30Txs8coIbnjtWrpMe2zTKjOAce9agXbnr/8AXrdGdi94S1FjIY3PXA5qDx4Y5ryBCSdluzKFPfcKSMBGDgYOOo4xXNeJ9VW2v4vMdn2xHPOTyeP5UrC2Rn3N0dmGZijD5hnrWeWgKfKpGTnOaZ9siuUxG3PPBqq5J6GkwsdD/wAJBJNo50q7kkmtwwZM4ymOwPpWTN9lP+reQf72KpZf/Jo5weRmkMnQ7ZkOcjNemeJfl8PaXJnkSR/1ry4H97EM16X4uJXwlZSbujJhc+57UmUVvF+oC98NMoPKzpx+BrzeZT9nP0rrtcJh0mHnicBzXJlg0OMdaUdhszp4hcWJTHOOPrXPlG5+U4+ldMuNmKfb6fJctI0EfmFRlkAySPUVVwMDS7p7DUIbhSfkbn6d69QSYNGjxHKsMg+tcJLbqpxsG09CBWz4c1EpMthO3yn/AFTHt7VL1GdVG7HJ9asIoHPX1psIVhjoKefkPtUgKn2mO8gltpJNwbaIw3ysD1yOldRKePeuZinEdzFJkAKw610r7tvzDBxTApT/ANa8iu+NWmxxic/+hV67PjIJ55ryC/8A+QzcDp+/b/0Ku3B/FI5q+yPVFmlOMBfmA45x0rD8T6RJc7b+xDG9hG4lf4wP6iunjsHSJGHUoCPyqeO3mWEPsIIGRXG9zpRzPh/WF1KxVshZV+V0z0P+FSXGnPd2N3Z3bbobhRho+qEd8Vl6tpd7pmoNrmlwFozk3UKjgDufpWvBfwXGnreRTDyWXduPb2+tSM8uvbSaxvJLWbAeNsZ7Eev0ru9F8KRtpCT2dxG0ky4MvBz6gHtVrxN4eXWdL822w11bjg9D7qf89a5XStYuNO0rMYbfbyEFCSAwPYj61d7ok2pPDtzaTFW2AjlmPpVW5by1ZI2Dh1+UYwWHrWZaeMr6XVbiO4dVhZWEa4JCMen4VFqd6YY5biFWNzbsu9mU8c9PpS5SrlZvMilLxOUwfmQ/0rWtp2MIfajr3OKhRrfUI47yIDZLwc/wN3Boef7NB5duBuLct2H0qR7mils0kzs0cZXYMAD7p/xqOQxQRECIB88H+tWNNjkitJJpv9XuDEHvjtVN3aaWSWTqx9KATMA7Rey+bD5qlumakaTTwxRNPLSjqF7U26RkuZGXqzYWrtpp5tEBbln5Oe9UJlZZVC/8eM6gddpNUYjuLt/tGtuS5KI21eMHNYkH3PqalnVh1uX9LGb+P2JP6VvMc5rE0cf6aWx0U1sM1cdb4j6HBr93cjfk1lTaiUmdEuioBxjHStJmwSTWTJFGWJ2A556da0oLVnDmcvdURp1KToLsk/SpoJ5JUDteqjHseTVZLdJHIZB14G3pW2un6fja8EZZQMgiulnipF6bxO+safcR/wBmLEjj5ZDJ78cetYbRSR7lYc0seja9CEaXTbsQRtkllOEA71ZnlzJnaOlTZLYlXe5SAbK+hFRyhvLIIxwatAgoh7g8cU25lWUAL/KgGV4JA8kHqoINX84ljOO5/lWZbptkVuh4H6VobGZkG4ZLAA0MSILljuNVs5xn0q/fWhhHzOCSe1UMfItMYZw1DFiOvFJnsfWpHKn7q4piuVJh/q+f4j/KtXwu2PENqPViP0rLuDxF/v1oeHD/AMVBZ+8mK9LD60JHDW/io9R2jCA88/0qnCoM0pB4xNx+C1oYwV/3hVCMH+0p1HIxLx/wFa8xHaO0Y+bZKw5GK01wWAI4715Ib280wn7PqMqkk/IjnA5q+PGOrWsCN9vMkhPCugbitlJENHqARlOAcjPeuF8TzwXE1/08yGRY/pwP8apQfEvVYj+/tLaYeoyprm7jUpL6/urhht+0uXK5yB6VXMiWmHmMkm4MQR3qQ3wI+ZMn1Bqt360hXjINZlGhHJ5qBl4Hp3FOzgcc1Thfy1AHJqdrhljZhj8qAHPeRxyLu5KnnFd3rvi/SdW8I29nbyMLmMqSrL05PevNI0e6mWNMbmPeiIN5mBnjtQB2eq6ibywtIycmKML9MVzy58vjn0qz/aEDWhTB3ggDI+lVYGX+I8DNJaDZAMgsD2NdH4IOdZ9PSudjbzZMZzzxXT+E0aPXVLLs3gMB7E0FdDS1vwjJcQXWpafHvCTlZIFHIG0Hcv58iuImt2RsjKsp4x2Ne46VzZ3u3tdH/wBBWuc8U+FodRha7s4gt0vLKvHmj/GpGc3o+q/bbZdzAXCcOuevvWqZAqmSQ7V7k1wN5bNETJGWGOGHQitDQNYEMqW16xkhLZjZznyz/hSWo0knqdgsRkwzLgg8D+tdLo0yzQrp93w6/wCpcnkf7JrN02FZj8rDI5ZieEH+NLPqdqLVpIYGktYAxlnj5KYPB9e2ad2wlLmLt5E8MhSQYIP5149qWRrVyP8Apu3869lsruLX7VNsyvNtyjg8SD1/xrx3WI3h128V1Kstw2QR05rtwfxM5a+yPfrK3D20RfBIRR+gp8vlxExv3+7gZJplrJIbeERgHMa5LdBwKmeNQC/LP3Y9a4nuboox2jKrDYgQ9c85/CvOdbsY/DWrTLsY6NftiRR/ywc9x7V6e0wAIbArifHWDod+eD+7yKAuLpt7LF/o8372VFyrL/y3T+8Pf1rN8R6FbpBc3lqnzMAXUDrz976+tYfgzxAGaPTLwhip/wBGdux/u/4V6DEQ/wB4cH1pbMZ5DeaVFZWMepu2XmkxtVvu+hIqxrW7+yLpgciYKxyenI6flVrx54dfSpzdW5Jt7hwUTn5SOork4hJLFtkZuvQ1og1ZLot/cWcpMQ3RkfOhGQa1LuVbxFm02QiTcPMhzyv0HpRplvHBo9wV2Cdp0C5+8Uwc4/HFc7FI8d0siOQ+7kj60rX1HdrQ9IkLrptvbsMMV3NzWfI4Qbe1FlM9zEGlkLt0JNGoSJa27OfmJ4Re5NKwjLtMXertuOIos8noTWw8STW7tuKOoJyfSqNnZNBahXPzt8zn3NW2lJtfK4J4y3qPSgDNmG2ymYt8wU8VlQ5EYHtWtqH7uxlx3GM1mQj5B9KmR2YdaM0dI4lc/wCzitFyQaoaWMGQ9BxzV1j171xVfjPosKrUkRTPtjdvQVnI2U5B71dutwtHYDqwX9aqt16Zz1regtDyMyleokIrHofWunRAY14BO0VzIjJGfyrp4hiJT3IGa2Z5qK2rTMJXea6vzA5LJ1Hyk8Z/lWV5pB9awNTv7i4nNzNIzyueSTVUahcAYEh/Okosz2OnWTKcdiap3FxcAfKEWMHv1NZlveyyoVZstnipGdmPJp2Bs0Inf92NwZd2RgdKuh+V7fOKykcBEO7AyKnMyHjzeaGBpajKHVcDHtWUWqfYZsf6QGx6CodmPfFADd2eal3cVHgBaeyqqcZzmmBBMP3a+u8Ve0LK65ZHnHnCs+Y4j+jCtLRQraral2YASqePrXp4X+FI4MR/ER6sMFFPowrOt3xrcqkEgl+/+wK01GEH1FUI2iGtNE7EFpCQMeqV5aO48p1dfKujtYHJz9M81llm3hi3J9a09XYvfyjjAOAaz3jxnmtEJjgS+WC9OtSxcDnqelNT91EARy3NEcqhhnIz0JpiJ8BTycip1tZp08yGGR1HBKoSM+lVgrH0/OtPSdVvdKmJt5GCN99B0ahWE720Ijpl+qeZ9jnCgZz5Z6VVLSuhG0DNdDJ4j1C7gNrC7wxsDkGQnPrgmqUWk3UxcoqlY03Md4GB+fNDt0Er9SpoibNVj8wYp94pt9cuSgwA5wK0LDTLyO8ik+ySOo53ICRRrGi6rc6zPNBp8whcjDbfYZourEr+IY8tyZARtA78U+NlFuxfGSeM11KeHIodMktXto5ZpAWWZQdytjge1YyeFdZkiETW20DkHrmpvc0M+FA8wKnAzXWaM2Nas2X5QYlU4Of4qz7TwZrg2kpEmD3eunstE1CC6t5pPLKxLtIAJPXPpSe5fNpY67RPmsdQ5/5ej/6CtTdh2NVtIE0enXjMskW+743LjcMD1+lWRSJOM8YeGg4bVLOPPe4jUdR/eHv6155d2vlHzE5jJ617r1Fee+LfDyac731vEWs5T+8Rf+WZP9KQyl4U8Q+W6WV0VYjiMuMhh/dNdNrN3pliUu7SBBdXCH/R1HBJGCWHTaAe3WvL2ASQlCcA8H0rq9KvINftFs7xyl1CdySr94+4/rVCsSeFrjUhrH2qLbHBjDr/AHSOmPf29K3fG/h5dfsBrunQhb2EBbqJergfxVLZ28cCrFEm2NBwK0oJ5Lfc0Z6qVYEcEH1qozcXzIlxUlZmjHqNvBHaM1wiF41CBnxv4HArWjmLx84z7V5xceHUM73E88k5EhMXmNkRrnIArtNKlKWyRl9wVcBj396zuX0L7ZKcgce1cd43AbQtRIGQITXUXt/DYWVxeTt+5hQu+Bzgelcd4i1bT9W8NX81jM777UuyvGVKgjjOfpTQmjyVCcgqSGByCOoNeq+E9dk1fS1aZszwN5cvv6GvKoyFQPnk8L/U11ngS7NlrU+nz5Q3CZQHuw5H5jNOQI7vxJYf2jo+xSA8bB1PpXnsumEylpRFluAFr1EqJ7Z4z/GpH0rhZLQ291JE4JdeDnrSTKMj+zrfeFWPJZTyARg1UTQrORBNtIcsc7WPHNdLEuZo22FyueMcUXUOnPIzSWs0D92t5f6EGqFuUYLZYYOGwBzmqgZby7EjKfLX/V59O5/GtG7SxmWED7TEgAVwcEOc4BIBrUkeM6iNK+xweRhlWXytsqFVzuJ/DkGkBjyiMrjPOKpdHxnOavizmvGZbZC4AyW6BR7ntWfMixyhS+4jP3BkGgCpqhIs2H8JIqgn3R9K0LpILhRBJNJCCQRmPdk+nFSWekWc9rHNcavBa+acR70JB/3iPu1LOyjOMY6iacMQs3q1TvJ1FH2ObTy9rcKFljYg4OR9Qe4NROea4ZfEz6Si/wB0h91kWMQ/vyE/gKztw3kZxV7Un2+RHn5UQfmeaoFx5g+X6muuivcPnsdK9d+RYRvkHzZ55FdKv3V+lcqBGR8owc106n92vPOBVnKjzBndupJ+tCjJooBAPJ4qzEmt28uUHrx0q0shJJOKoKwV8jmpoZMseMUAX2b9yKEPzCmE/uaEYZGfWkMt2zlScVIG6+9VEfa3FSebzSGTdjT2BNV/Mz+NSB8L7etAEc4IjPpkfzq5pr7L+25481f51Tmf90fqP51YtTtuoT6OP516mC1hJHBiviieybcKT9P51mpNFHrrmZgiJJuLMcDHl1pjmE/SngKf4A2eteV1O45P/hFfDssryy30LFzuOGY/yqQeGPDKDcpWQ+0EjV1kYXso/KnggcY6U7iOZi0Hw7gH7O7n0Fk39anTRdBUDbpdwwHpaKP5muiHTNQXz7NPuHBIIjYgj6UXCxlxadpSgeXo11/36jWphbWakBdFmz7yIP5VfsoJoY9kxJRQvlEnJxjnP41ZC56cGlcehjf2fHJIrtokZOMLvnHH6VLDZMp3JpFmB23TH+i1q7RgZ5pw4A+tFwKHk3n8NnYJ/wACc/4UjzzRx7nm0tAG2klCcH05as7xwdmhxOxfYLuLzAhILLnkcdfpXH28lrFdh4YY3jju7gRW1zC75Bx2A6getbQp8yuI9AWS8f54bmxZD0aO2BH55NSA6ket+q/7lug/pWV4TVU8OWyxvuTc5VthUHLE8A9q2xWbVnYCMLfn72qTj/dRB/SgW9xks2p3hP8A10A/pU604UgIo4GyGkubmXByBJKSPyqcCkFLnFABjioZoo5oXikQPG4KspHBFSZ4phPFIDyvxP4efRbvKAtaSn90/wDd/wBk1gJJJazLLE5R0OQR2rt/iLrrW0A0lbcN5yLL5pP3cHpiuDSZZUB7H1qkM9E0HxFbalaAuwSdeJFPr61tG5iVkXeoLnjJ6+p+leOpLLaTiWJtrD07iup0rV/tNyZCwY/ZSqK5wM5yR9cUmgsdLrPiXT7CMqZhM2QC0R3Lz/tD6dKydM8bJaGKRWMkTod8eSGjbPA9CK5TWLBrWLLWzRfaZA6LknagH9TVGMRpILiZ2EcK8qP4vRR9aEgPQdU8Sf8ACQWr289zFZWEn3yXwXx2z/QVNbavplnpyQrdb7dV8sPJFlGHYYOM1w1sk08qX2oQEQbcpztjiXtj1Ndbonhr7ZHE107Lbs4dBNzI3vjotDsMW4h8Lagwh+ywNclchUJjJH1Xiq8vh+0ubeO7gt7w3MGPKMd2rMQvZTjBx+ddjN4Y8P2cL+XGpeT5WYudxHfnNU/7GithbxaNdR2kUOTJCV3GXjjBP9aVw0MrR49Y1zUCnm6pahfmYybUQe3TrXS6l4ckuNlx5biZBtby8MWH6Va0PW21G0V7WUqEJUh48H9a1Wub0jm5P4ACnoJs5RPCd9JgRm4jXByGh4P1w1Z+o6H9hd452lBA7Rg/pmuzuJpVUb7iQk9PmxXkXjG/ubzxBMrSOFiwFw1FwRNPd6YZTanUJlJO0o1oSWPtzXo1n4eSPTyl3dTztOq7nkIVgMfdB6j3qp4f0iw8R+FbB9WgWaeNSI7kDEqYPHPf6Gs3V/A+tWyPdN4h82yDchbdy4X3wT+dMLmR4guHt9Qm0+HEdtE2BHGeDx1J7msOQ7mB7gVdutMv5ZDLBDJOu7hkU8ioP7E8QSTJ5GjXTJk7z5ePyoGY2qAsYUU8lieuK6LT/DDeKHiFnvtnEAWYNCTHuUYyrDrnrVK68KeInYN/Yt2Qo7JmvQ/hJpt9pttqK31rLbNI6FVlQqTwaVi1NxWhxOswXUF0q3NrNb4jVEEylSyqAM/pWYBukVQOSa9j+IWjHU/D7XESbp7Q+YuByV/iH9fwrySxtpZ7iXaoVof+eh25PtnrXJUg1I+hweJhOkr6W0PSfCOn2D+DppLy0inSaRlKyICGwcZrz/xJ4Yt7aSSfSZWQFv8AUOcj8D2q/pvi2+0bTRpNxbrPD5u5JEbmME/Nn19aL65W5lUxOHTG7IrsjblSPn693VlJ9WcYkskEvk3ClJAeVYYrqQ4wMHtVPVIIZ7aSWZQSg+ViOc1n6bqJZjDLkFRxn0pNCizjzSHt9KU0h7VZkGTjFSxH56hOKkiPzCgRoD/VGmg9KRGBjYZ6UgNSUTZ+alJ5poIobrQBIrdKk3np2NQIeamBoGEp/dNVqE4kQ+hFVJf9U30qxGeQa9PA/DI8/F7o9ot23Qj0K1Oq7RiqenPvslJznyx/KrucAHtXkvdnethUHA9adjvSI3yinYyPxoAWl2g8NyOhz3qJpkU45PPPtTTdLldoLE9OKVwLo9PQVFJdW8BxNPFH7M4FeceOPFd5Y+IZLFXlEAjRl8s7Tz/OuWfV7S4cyz7i7HkydSauwHs0muaXF96/hGPRs1Xl8U6JA4Vr+POA3AJ4ryH7TZSRuuJULdCpIx9KffXdpfyKWVoVRQoWMEdBRYD0PxJruk6tpaQWuoRLMk8cqtIrY+U57Cs+1HmC4v4tesoLtrh5QyxMQN4AIG7muItZraW4+yySTFocFGD9RXX+HfDK+IL7yoL6W3BGcsNx4q1JpWQWOp027061sobVdThmK5+Y7U6nPStVGV1DKQwPQg8GvPvGvgyDwtcWFzFcyXryygTeZGMAeoArofDmrWcWjxJc3kUbqWG0tjAzxUPuFjpFNOB4rLOv6SmN1/CM9Pmpw17Sv+f+H/vqkKzNIGjNV7e7t7pd1vMkqjupzUhbFMBxOKjZqQvTGbpSGcl448NTaxGl9aHdNAhVoz/EvXj3rzCIMpYZ4B/WvdmcYrgfGnh5Y5hq1lCkcZGLgKcZbsQOlNMDiWmB+VutTWnnSXlvHGzMDIMr1GO9Qzw+ZJtHDgce9WLK5msZUkVRvQ8EiqBHU+KNbiOkyWsYZXfAUZHAB/TiuHiKXN3FDNIY4QeSBnk1Z1C6N7NJK3BI6DtVSyuPszSSKql8YUsM496SQM6bT/sq30slxK72Gn4ZRIc+ZJ64/pTLrx9dCZ/IgQAN8m/JOPeudWWTyDFk7S24j1NVJOJWx60cqYXOpufiFq93M0jLDGWAB2J6VPpni3UJ5djX0EbE8LNH1+hFceGJBzirtnHAkkUrzDkgbSOhp8qFdnoGn+PZYtWjkuWiEXCPHGvBP94HNenpcxXNsk8LrJG4yrDoa8d0PSfD8lz9lv4LnUruWbCfZJNkeD0AyMk/lXpdt4avNLEBtHBtw/EMkrh0XuMkkN+IosugMfrF6LOzkueMxqTgjrXlF7qD3t693Pbwu78/dI/lXoHiuVF+0aducSFB5av95yc8DHHGK85lieJjHKjI68FWGCKmw0dPpHxC1TS4IbWC2thbocBQnbNesRa2JbdHWAguoPLcc14BCPmH1r3SyjWTTbYjGfKX+VGomQ33iRbLVLOxWzjLXAZixHAx2Hua1HvJ1AKoiA9sdKrStaRNCLjy/NkbbHuGST7Vc8lTjIyPrT1AgW8u5mwJdg7kKKoakdWk1eyS0MhtV3GR88hscE+3tWwsSqOBiqd7qkNjfWtmULSXG4gDsAMk+59qQXG60JV0G9befMFu/Oe+0187X11qMW3fdMd3pivpeZEuLd4pEJjkUqwPcEVxWrfDLRbuMGGGZSDwA3A/Pmpa1OijUUYNdTx6KWSS3QvKST1yakhvLq2kLQylefXP6V1mo+C9N0+7+xTTiOVRkDzMZB6HmqUngln5t7lmHbIB/lVKwql5O/QyJ9TubiLbMEIzwF4LN2rKeOS2uWMhJP8AEQcc10M3hPUoZQ6+W4XoM4NZtxpOoxyNJNYyksf4BuzTM7M5zb70m2n0YpkEeylAIORTqM0ASo+4ehFSL0FVckHjrU0cmeO9AFoGg9c01DwKUmkMcODUwPvUA61LSAc3+rb6VOnQfSoP4G+hqZPuL9K9PAfaOHGdD2XTGVrCDHJMCn9KvdVArN0IhtKtm9YF/lWivIU+wry5r3mdsXohUHA9qk28UxeFqQHipsMaIk/uinKg+6oAx7UhNOQYyR1NAHjHxCvrfUPFcklq+9UjWNuMYZcgiuakgaUArgFeua7nxD4Ka61W41DSxJdW0k7rKgHzxSA8/Uc1gXejDT5PKuPOt3YZCycEj2zWgGdGe1P/AIqkFpGrcTMR9RThDCD80p/EigZZtFXIbYu71xzXo/w6fy9VDscKFOfbjrXmsc0MPAlH/fVaEOq38FtI9rPLGjqVLJwCO/NIDb8Va/c+LddkMGfssBKwp2wP4j7mq2l+G49QBEuqrbSj+Ax8EeoOaz/DN7EuotZtw9yhRGPRe5J/Ks+71N3vXdX4U4GD2H+TQkDfQ7EeB4f+g8n/AH7H+NH/AAhFv/0HR+EY/wAa5CPVJV58w8e/+fSrMesXA48w/wCf/wBVOwrs17i31Hwjew3MF4J4HbCyKMAkdVYV39rqEd9YW97Fwsy5K/3WHUV55rN75uiW0TyBj54OO/Q1veGrkpoADHhZiB+VJqw90dOZveomnz3xWa1+oHWoH1AY4NAjTMtUtYmt10W6N1gxGIjBOMk9B9c4qkt+WkC5qjqkv24TRyH5LdEKof4mY43fgKQHF6np97psiLdxYdVBODkEH0qCcsYN8ZGRzyOorqPHzOupWnlnBMR69OtcoH8shgVKsMlM8fhTTBobAfOgLFQGzg4qhgLI6njBrQgKRSnAIRjyD2qHULZoZRMB8rdaoRCPboarS/61qtphk+YgL2qSKxe6kEYj3MemKAM+lBwwPYHNb9l4Xa6Lh5jCwYgfLkZFQ3Hhy7t7hbcMk5c4UIpJ+uKSmmFmjrvh5PbxeIreeR12ujLHnsxHFew31/ZW1jPcXzxokClyxcHGP/1V4LdeDNS0u3jaXUo1kkx5UMRYu34dhUs9nrd3qOnaNfalLLFOyn9652kZ6jPXiqEb3jzV5r/V7K+0x5Ekuo/MFs64ZFGcOfTrXPXt3NezGaeRpJCBudup4rttUhtGF/eKkfmoptw/dUUYA/ma4OMCYgb1Uf3mPFSxofDwwzXu2k4/sy1J7xL/ACryPSPCepa0zjT5Lecx4LYk+79a9i0/TpYNPghl4dIwpwe4FIbKt9o6X2pW18bhk+zhl24BDA9Qapf8JfCnic6HDa+aIoDI8mcHIGcAVty2T+U2HGcetcNa6Fqf/CfT37WjJatbsqzOQAWK4A9aLiSO/tbwTW0czW/lF1DFCclc9qragkdxJBILaF5IpAQ0mfl9x706xtpPskSSFXlRQrlDgZqxNZPMqKGMQDAkqeTjtRqA43fOM8ewqqyEyPK87MvG1MYC+tPv7q20wQm4fZ58gijwmQWPQZ7VMbOJGefyyzuAG59KGB4z8U1C+KIcd7Vev1NcfFeXVucw3EqY/uua921/w9oGsus2qWiiYJsSXzthwMnFeCzBUnkVT8qsQPpms2ejRkpRsaUfifVoR/x9GQejjNXofGlyBiezjk/2lODXOU2hMuVOLMykpTSda2PLEoxS0ZoATFAyDkUUUATxSZ+tS5qn905FTJJu70hlhTUg7VADUymgCQfdb6VNF/ql/wB0VAOasQENCv0r0cA/eZw4zZHr3hshtFsz/wBMFrTQ/IPpWP4UOdCs+f8AlkP5mthfuLXnVPjl6nZD4UPHf61DDqEErXaxuT9k2iU44BPRc+tPkmWGGSRzhUySfQVxng7UpNSt9Yi3cNd+eB9R/wDWqC0dXJqIUcIc+9Zmv+LV0CyhuXt/MEr7AAcY4zzUgDMMN1rlviSGGh2YPT7Rz/3yaFuFiLRfHl5H9tIhgCzXLSqcnjd2/SuS8VeI7jxHqqzzqoEK+Wm3pjNZKu0ZyrEfSpYIkuZ9r5Vm7j1rSxIzepiXn5s9BT1jD4AIOa1YdHs1H71XkPqpxVXUEgtWEduhTI5y2aGXCPM7CpDbQEebIreyc10jeLNPfwx/ZEdgsb5P79n5/LFcZupM1Bv7ONixJcGKdJbeba655HuKpbv9uiU8VFmrRzSVmTAj/npT0cZH7zvVbNGaZJ0uqxJFHp9z5uUdcD/gJ5/Wt/R/EumW+iy2sxdpWlDpjgAd65i9l3+HdHU9V87P/fQrPU4qZHRTgpLU7mHxLpcvE63UP+0m1x+XFWZWjltjd2NwbmBeHbyypQ+hBrz9nO2uv+Ht48+p/wBjOw8m++RgfUdDUo39jBlizuy1yOa2LjTodQhMcg2yFf3cg4KH/wDXXOqn2bU5If8AnnIVP4GuqgOY42oOSSscZ4tW/iuLcXrb8QOEJYMT68gD9a5q4O2cx/3VA/Suu+ILMlxYvxnY3865LUI41uJGEwZi/wB0A5Ax3pxE9iNZeO4xWtopOp3sOmuQUncIGcfdzWED1ra8JtjxJYH/AKbr/OlUbjBtDhZySZpX/gjVtNd3jt1uYVkKbQepHtVKOO4h88m1uY7nO1AqHCY969c1Bv3JPb7S1ULb5NW1OPspdgPTcAf6159LFylC8kdUsPFPQ4exGoR3ERUsqScb5By7HrjNWpZo9Ds7thmSZZPLkkkc53HOcfzrYvpVZtPjA3NHI7sB1HFc94qkV9Ly6COWW8eRlBzxjg1tCcpNWWhEoRihB4tlt/LvYhFJcSgmR5DvKnOMAfSs681B49WS+W7Et2oBBA+VOOMfSsLnZwccc+9SxjIrtsctzdGq3FzGyTXJYuctz1+tNXYG4PNZAWnAH1NFgudBbale6cxksbqW3Y9TG+M/WvQ/DXjaEacv9p6k7XGe65P8q8eAb+8fzqVGnH3JXH0NFgue4z+NlwpsVabP3vMBXH0rO1O+bXrRrW7jZVYhgySEEEdDXlMQ1BsBbqYD2c1fhsNQm+9eT4P/AE0NKwXPWtPkmhER8522AY3sefrW/Hq4CAzXEEY75YD+teOWnh+eXAkuJ2HvIa3LHwhbs4Mqlv8Ae5osB6I/ifRAu2bUrZzn7qnec/QZrN1fx/pllbzraxTXs0a8xouMeme4/Kq+l6BZWxUpCuR3xXKaf+58b69twCqcH0+YUD0JNRsYNX0ZIFtphMRvVTcPtVic8+vU1zl38PtReUmyMZQgFUlJU+/J613D3tw3SZ1HscVA2TlpGZjjqTmpsjSNWUdjyi/sbnTL2Szu02TRn5gCCPzFVq2PFaumsM8sTJ5iho37OBxxWKssbdGGamx2wqKS3M+kpaK1PNEpMUtJQAUUUUAFJ0ORRRQBMklWUbPeqHSpopOaB3L6dKntMbBVSNs1Zg/1YI967sB8bOPF6wR6r4YkLaJaMcHj+tbCTcc9RWB4SJbQLYg92H61soDg59TXDX0qy9TppawRj+NdVFnoEsatiSc7B9O9cf8ADy7aLXZ7dWwJ4T+ODT/H1/5+oi3DfLEP1rK8ESBPGenqzALLIYyT05GKhbGh63FAc57muX+J8Gzw5bN6XI/9BNdxcrDbSBA4bHcd64v4mS+Z4YCZBK3KkfkahfEPoeTGrelhWv4g2cZ5xVPrVvTjjUIfrWxCLGrancwXzwwMEjABAxk/nVCSaSbDyMWbHJrorrwXr2qRtqthYNcW2AuUYFiRwcL1rnZ4JbaRreeNo5YztdGHKkdRSbRrT3GLxSk00tgVGSTSsauVgkOajpxptUjmlqwoopaZJpTSZ0qwX+75n86gU5NEjH7JbKegDH9ajFTI6qT0LBXKmtXwdefYfFWnXBOAlymfzxWfp8RuZDF3AyKbaEpeoV+8r5H51B16Ox197g+KL1QePtD/AM66CzcNGg9K5mG8gfxAV+wXUhncb5952jPcDHSt5tLUy/6PfzIndSoY/nVWZ507czMPx7KqS2TNGkg2MNrfXrXF3hLzmToHAP4969Kk8JaXcSeZeNeXDnqTIB/IVbt/DHh+LH/EpWTH/PZy39apKxDZ5JgDp1rZ8MRT/wBvWTpE7YnU8KT3r1WKx0y0AMOm2cePSAH+dWl1O4gA8lljUdAsYFKS5k0EZWdyS5try5icRWkxInJxt7cc1g6vf/2BrV3LeQybLpB5ZTDc7cHPp0ro4dZvJjhbsRnt5nT86LyW+jQPdW8NwODvRgwrlp4SEVY6JYiTZzsPgTV9cis703FrDb7WkBdm3MW9gOwrC8e+En8O6bbTvepOZpGXaiYA4z1zXdL4muVXaIQUHp2rh/iN4hh1S0trNColhkLOo7ZFdUYqOiMXJvc4LP7v8Kmi+6KgHMf4VYQgAVRBKBTgBTRTwKAHqoNXLdFJGaqRjFXrcDIoA0YE4G0fWty0VeOKyLcYxWzadRQBuWKjI4rdtxjFYtkRxWzbsAKBI0oWIIwM81wULBfHWur/AHoz/MV2bXflxEp97tXAWcrP471UsRkxHk/hUlm4GHlnqcVBKzmM46EVK8qpHjoTVae5AjbgjC9cUhGB4mvrabTrXTJLe3aWNGlSXb+8znoT1Arj7jQ3bR49UtVaVfMKzKoyY8/dz+taGrWtxqfiMxWa7pSq4G4Dt61o6doPi3TfM8i1eJjz99Sp9cjP41rCLktEDdnqcTtNJg1p/YV/2qadP9GP5Vncqxm0laLae3Y/pTDp0ntRcVijikxV06fMOi5/GmGwnH8BouFirRVg2c4/5ZmmG2mH/LJvypgQ0nSpTDIP4G/KmlGHVT+VArE8EoPXitC2P7oc9zWMCVOa1rI7rcZ9TXZg2lUZy4lXgekeEpiuhwhecO4/Wt6SbyoJJG425Jrg9G8RppNgsBiMjbiwwpPWjVvF95dWckEFo4Mnfb/9euWuv3sjej/DRzet3ZutQllJzuY1RsrlrTUra4U4MUqt+tIbe/upwnlFWboGOKludAvrSEzXDICOiK25j9KhI0ue3FJrjZJtYAgHmud+INuw8JzOcnbKn86f4c+IE9zp4S90oRtCqorBiA+BjPNUfG3iJtR8Nz24t0jRnQ5BJPBqeXUdzzEDGasWHF/B/viq9TWZxewH/bFWSe//AA9df+EWjBUn9+4z+IrxLxiAvi7VQP8An6f+dddY3csdqY0mZUDE7dxA/KuD1ok6vck8kyE1NtTaDKJOaQ0Z4pKY2Nam05qbVGEtwzRRRQIsFi0cQPYHFFIOY4/oaUVLOilsXdKl8q9DD+638qZZNi+iY/3xn86ZanEuf9k02E4mX1BqDrj0PULKVTZwrjnaKtDIPHFZ+m23mafbuCdxQGrZt7hRwTitFsefU+NloOBjdJT/ALVCo/1n61mtbTsOc1Vks7rnbTIsbMmo26L159aoya3CCQBk1lvY3x48w4+lRnSbpv4hn6UrjsXZdb3cKpH6VU/ti4DFo5GQ/wCyab/ZF2P4M006ZeDpFxQPQz9V16+iUHkh+HYZBrm5zA8PmrcyyTMx3JIv3R9e9dbNpt0wIe2LL9M1kX2hSBGdLWRT7LTEzBU/JirEfIFNexnj4CN+IpgLR8MpGKBFoDAzTgx71HDmXgOin/abFSTWtzECTsI9Ubd/KgZLG3vV2A7sYrPFndxruKEoRkN04+hrV0uyuLlFeGMzK3Qpzj60gsaltwozWrayYIqG10TUGH/Hq4HvWrb6TcIRuRV+rAUCLlm7HHOBWzbqcAisqNBBgPtB9jmrY1SztgDLcovtnJoA03iZ4iF/OvOom8vxfqzSzGEJA5aQDJXgc4r0C11+1cFbWxubqQZIAjJz9MCqZtZ72eW7h8OCKW4Uo8kse0kehBpFIwfB8+r38iypqdjLCTgLeQh8+mCtd9e+B9J1iD/iZWiJORy9o7xj8s4rC03w5qiTxMY4YI0fcVRQN3txXewbhEu4YPcAdKoTPD/GPhDS/Cd3bvpusu0szkCKQBtv1I/wrd0q61aw0mG9vbdrmxk4WeL5ip6YI64z616hLa28h3SW8Uh9WQGvK/F3xM0WdZ9GjGq2pglKM9oUTO09Oe3FVCbg7oHFSVmcKAgOKa2Puqv40dutIxPasDQcqjHPJpzIuOQKYD3xS+Yf7ufrQAqgZxjpSlFJqMyNnsPwpu5z/EfwFAE2xR1x+NB8sdcVXIJ6sT9TRtAGeM0wJS8I4Ipm6Mn/AFefwpgx34p2FI45osK40opJ/dpj3AoEYXosa/QU8YGMAUEL60xD0fYMFgfoKXeDydx/Goxj2pQMnvRYBzpFICrJz2OenvS2uvNaTfZLlvMC/dc9QKZuGeuKzb61tmd7hrgggdBQhM7O28u4USZG08g7s5qj4jjB0edhtwMY/OuZ0jVnt8q7blB5U9MVo6rrMM9hLAkf3xgHPSqEc5UtqcXUP++P51CDUkBP2iP/AHx/OmB31tBvUkZ69q5HxNbmDV5M/wAYDVq6tczwvEkcropXJCtjNYl0pmUu7En1NSXHczu1JUjLimUGjQxqbTm6U2qMZbhRRRQSTD7ifjThUatlVHpUgqWdFLYmtvvn6UqLifHvTrQZLfStKx01Z7uFc4DOAfzrO+p6EINxTPQ9HTOlWvyn/VitJImbgcfhVu2t0s40hVVKoAowKtrLuwFhYjuRWiPKnrJsz1j25yufqtPSESD/AFNavnWsSFp2RABzvYClj1bS1+VZI2z02nP8qZJnDTVKg+VnPtThpkf/ADy/StmHULfkx2szZ9Izz+dTGeWTJjsiuB1dgv8AjTJMEaWpGApFKNLkHBiLD1FbPmXsgPkRW271OSPzpxgvZOJLhU45CR/1pDMf+zFX75RB/t4pjQ2KNte4gH1YVrDQIXO+WQse/wAo/rUsOj6e2QYtwHXeMfpTA597XSGBPn2rL3+Zazryw8JvGVuHtZD02xAM36V3cek2UKbY7aED02A0v2ayt+DBBz2Ea0AeS3fgXwtfRiSy1SSzlb/lmyFsVTtvh3qVvNm01Msn95ImUmvaU+xqRst48n+7GKl8yP8AhQA/lQB5fbeCLsbWmGqXrY6Dy41/M5roLLRNVhtvKg0OGIL3mu+T/wB8gV2auo6flSM6ryzkCgd2ciNA1vPz2lgqnt5zt/M0648I3VwmDbhD3MUv/wBeume5t2P+tYY9OlOS5jVhsckY7Ug1OQXwdcRYP2GGdl6edvOf/H60bKHUtOkVU8J2Dr/fhdUb8mH9a6YSbhkTEe1OWVCNruGPuKdxGC/iuxtLxEvtIv7S6cbV3Qbsj0DA4NWT4u05QWlgvo1HVmtXx/KrepWa3sGwEDady57HsRVaPUZoAsN04yvBbsfrSGWbLWNL1FVa1uUfPQYwfyNaGfeuE8Y67oujac99iJrxXVR5DgSc9yO49jUfhb4gLrMK+Vau4Vf3iB/ukdcZ6euKAZ3xYKea+Y/GNlY2nivUI4ruWU+e5dmi2gMT0HPI96+iY9cspY1kjfcv16e31r5w8VzLL4p1N15VrpyPzoKiW9/GMjijcp69ajIx2ozUgSbh26UhemA460FsDrQA/dSBh9KaG4oyaAH9qTANNyT3prOVHHJoESlfekCnpVZpJnHDBahlumRtpk+Y9s0wL5XB60hBxxWTJJ5mBnJ/3qIvtATdHIw/2WNAFie4uIyVyAPYVXa4mOcyGtERGaECZAGx2rPuImgfBBx2NAFdpJM8sT+NROzHjtUjHNMIpiIkJQkqcZGDUiyfLtzTCKTOCDQIcwxSxNiVD6MKaJcE7uRWtY2llcBHlDqCcZB4oGaOrylZoDldu35g1ZzmKRGHCk5IPbNdBJb264kIMox8vy5rNvLiG1aL7ZYsEb5kErkg49qB7M55+tMIqe4XEpI4BORTY13SIPUipOndEc1u8cau3ftVeulm01bu3dg+3y8fqcVmT6LPDIyh1cA8MO9UjmluZ1FW/wCzpM43DP0NP/smbGd4+mKZJXtYjNKsYOMnrU81u9vJsfr296msrYwXKlm+YHpU+qjPlv8AUVLNqT1sQ2Q5aui0OGSfUrdIsBy4ILdBiufs1+X6mu38FWDXF1Jc7GCxJgMRwSfSs7XZ6ntFTo6nVvaapIwea+gXHYMT/LFOSxuGHN7ER/uE/wA2qRlAzkEn1FNU7einHerueOSLprEc3sQx2Fsv9asW9pJA3y6i6nvsiQf0qkZ9p5BGPagSysc4I/Ci47G15OceZf3Uvr+8C/yFTL9ktxkxlz6sxb+ZrFV5Cv8AFmpU89vvKCPrRdisa324Ejyiyj0Apf7RmTOckfSsoTtHx39qPtLdqV2FjXTUZH4z19qcl3MW2ngfWsdbhiTn/Cg3G3pk/jTuOxsT3rMv+sYY6gVRM4JyGJ+tVTc5G0gYpFkQc78+1G4bGjHeNGAUVuO5qRNQkCtI0iKFGWZjjFZtrfSTF1e0aBVJCFmB3D14qhrWn32pWc1rHfrbwzLsf90DwevNNIk6Cz8RWd3K1vb3tvPMv3kRvmFWmuJ2+8BtPtXnvh3wpZ+HL9dRm1xZCqlNrsqjn8a6KbxPosGfM1OJiO0YZz/hVWEa8shByE/ACmjVSnHklQB0Nctd/ETR4M+X9olPuFQfqawr34rRqpW3soSexkkLfyxRyjuehtrj5+Vf0qB9f2fwPn1xXkl38TNYm3CCSKHP9yEDH4mse48U6xeqVm1Cdw3X94QPyFFhHrWs+JpZLOS3TUo7TzFKl2xkfTmuOsL6w0m+S5m8ReeFOWRFJ3VwM7sVVtxJPrUO5v7xoHc9N1HxtoUrE+TJOO2YVP8A6FXPjxp9nu5JrG0jgjKbdqgLu9yBXI8mnhWZQAM0CN6Txjqj3DTJP5W7qFXg+/1rGmmaeZ5ZG3O7FiT3NNS0mfohprAoxVhgigqJ0fzHndTeaUdORSE/lUDFOfrTcU7tQT370CEGe4pwpN/TijdQA4j8aTbk+lG7ik3rQMUov4VG9lFIdzoCak8wY7U0ygd80xDRZov3VAqQQRr74qJp8d/1qJrrsWAoAuBlFRyhJcqwyKqNdgd81Wkumf7pIoAS5hMLHHI7VXNPLs33mJphoAYaaaeaYaYhrDNOjd1BUOwGM4zSEUlMRveHfFE2kyCKZFuLVj80T/zB7GvRrG38L69EJ4bSF36srJll9jmvGq0NI1q80e6We2lZGHcenofUUAdb8RNIhs5rW5t4fKjkTYQFAAIrjbYZuEz612Ot+J7fxF4ZYSAJdwsGC9mHfH+FcXBKqzq3TBqWbQlZHSW2HhuYd2C8fy/UHNVLiXytke4kqOeaSOYkZUgmkd2Jzhc/ShOxm9SuZTuyM59jipYpjzuGB9c1Ye3ZbSKfep8zIwB0Ip0FlLJgl0Gf9mncLFCENLdF+wPWpNRXNuvs1dBBoqGMs8hwBn5VrFuU3IVJClW6McGpbuaU1aSK9uuMD0r1fwiFj0ZZF/dK/wB1T1AFed6da2MOJ9QugqDkRR8vJ7D0+pr0e1IFpCFQRjYCFHb2pJNG+IqRnZR6GjIhZg/mAqaWKBBICXHvVNXwQOSKmWVU+Z5EVcdWOMUzlNVYoZF3bV/KoLq7sLMEz3EUWBnDHFZcviPTrQkPexsQeitn+VULvxforAhrdrj6xjH61aRBztt8QZ5NWEEFjCkLOcqqkljnsc16Rtj2K5JGRn6VwUnjbT7Zt1rpdtEw/iYqD+grKvfiZqDORDJbxr/sJk/rRYD00CFwQDnmqlw6wAsWQAdy2K8lufGt/P8AeupznqFIUfpWTNrVxMxJyx9XcmiwHrs+u2UX+su4Qf8AeyazpfF+npxHLJIR/dTj9a8pa/uGOfM2/QVG08z/AHpGP40rIdz1F/HlnFndbO3pmQCqF38RUY/uIIIvqWf/AArzrr15op2QXOtufH2qSFtl3IoPQRqFrMuPFF/cEGSWWQ/7cpP6Vi0ZpiL0mr3jdHVc+i1Xe7uJPvTOfxqLGRRikAhJPU5+tFO2k0bTQA2lyR0pwQnsakW3kb+E0ARFmYAHtSYqyLNzU8enseoJ/SgdjPOantJ/IlDbA47q3Q1eOnqcDywue+c0h0sD/lptPuKQGgmtxRQhoYY0f+JCmSPoTXOsSzsx7nNWJI2hbDYI7EUYVhSWhe50ZjyelAi5q2YF65pvlcjFSBVaL2pBCT2FXWjPtTfK560CKxh46VE0OCKv+SM8mni2U0AZhi5phi9jWv8AZV7UotV9M0BYxDA56cUxraT1NbwgUdqPs6sw4AFMZzjWj981GbZvSunNsmegxSGyibnbRcRybxMD0JphVvT9K6ptOQngYqF9JznAouBzLI3em4roJdK47Cs240+WM8DIpphYoEU0iri2Uje1RzWzRcnkUxFbFJin0GgRHimtUmKQimIbFIyHA5B6ihxg0YpX9aAEWWRPuuy/Q1ILy4H/AC1J+tQ0lAFoaldhdvm8ZzjFPGr3w6XBH0AqlSgGgLlxtU1CUYa8mI9N2KiDuTuLEn1zRDaXExxFBI5P91TWxaeFdRuFLyqlugGf3h5/KgZQtW2SrI2DtbPzGunu/Hs7LiGSOPj+CPOPxNcm/wAsD/lVSgR0c3jG+kzm5nY+x21nya7cykk8k92YtWZijFAFttRum/5abf8AdGKheeaT70rn8aixRQAUYNPRS5wASaeYJVIDIQTQBDg0Yq5Fp9xL92Jj+FXIvD15JzswPegDHxS4ro4/Ckh5eQD6Vch8L26EF2LUrjsciFJ7ZqRLaVzhY2J9hXdRaJapwsAz296uQ6eidIlX8KLhY4OHRryb7sRH1q3H4Yu3+8yr9a7gWbgcYHtThak+9Fwscpb+FtgbzpQcjAxxipU8OWqHkM2OtdUsCr1Az705YVPGAMUhnMf2Fa9o2qGXQI+qR4rrJbfjnPPTFQG1l6gUBY5L+zmj4ZcD1xThaRjGSSK6k2bNkNGaiOiKzZx07ZoGc6tvGrjaDj3qQBV6dK6H+yFXqAKaNIXJyQR9OlAHNO8ak7RzVeRZJOgOa6ptFib0yPao5NI2DMak0hnIGwuZG/1ZNNbTLpf+WRrq/sMxb/VkEd81MLK5XkFcehoEQEZOKVVI6DFP2Z+tPVD36UgICmTTgn41KVyeKTB9KYDCgFJjBHWpwM9RzRsweRQA0IcUmwiplGakEY+tICuE70ojOelWDGAKUIT0xTAhEQ7DNPEJ9MVMF209TnqtIZDsA7UhiH1qzsDHikaMgHA6UCKUlurDpVSW0Vhz1rRY544zVdtzZyMUAYlxAImOF4qo6rICpFdBJEHXkVmTweUxwOKYGBcWxjOR0NQFTW9IokGMZFZlxbGI5A4NMVikRTSOalIpCvtTAhIpG+6KlKUxxhaYmRUlLSGgQKMsB6mupsUbzBhAFX/ZH+FcsDgg+hrq9MS9u7cXA2RxHuXxQB0FkrsoJQ4x06VfuZ4bbTbhm8tGETdD7etZ0FtfOqrgFQOGAJ4pvimxWDw/ucs0pdQu5uffgVIXOGkVmtwFGcmoltJW/hNb+iWUd2ZBJyEAIFb8emQr92IU7jscTHpVy/RCfwq3F4eunxlCPrXaLaYX5VANSLatkbv0pXHY5KLws7ffO2rSeErduJJGH0rqFjVeDzUhReu2i4WOVTwpao3Es59jWoNMjO1jEPlAUfKBWwItw4OPwpMgjDKBnqRQOxSjsgMYUCp/sy93AFPZU5x1xTApx3JoCwpt0jywIf29KVMEfdWmENj0pE3duB70AWgQOw/LpTdyj7wJNCPgYfvQeSQSAO3NAEq7XGQ350Apmod8a8Zz9KY86IM+nrSAs5yeCAKTywTuwagjuAwJwPelN3hflOPamBP93kNkZ79qd52MDGc1R+1g96Y92F5HH40AaHmxn7zEe1LvjXJDZrLa847VVm1BlP8AhQBuech4JyajN2qPtPANc+2pHn5jmoG1Bi2WOcUAdHNfIFONpqlLqgjGMisb7Xv4DHmoni3fNk/iaBmlLq+5e4PaqbanL/ewO1VPmxgjOKY4J7YApAboABqQY6UoC/WjKjoKCRQAelPCg8YqPcOvSnK3GaBisnP+FOA4oDb1yVKketGCaAHBRT8YpFGKRix6HH4UgH0YxUYViPmbOaerkcdaAFwe5JpwJHTmjOaXp2pgCuR25p3mcHimBs8d6Dn1pANZRjO3FMMRPSpcZpCcHg8+maAKssTA+tQvAJBz+tXmzjtTdm49qAMG4t2jckAYqs8RcEMOtdM8EbYG3k+1M+woD05+lAzjZdPkDfKDihNMlf8AhJrtVtY8cjn3qP7LtbCgDNO4jlF0SVhypqhqti1lsVhjcM9a777N/tVyni8RiWBUOSAc00xM5qkoNFUSFbGn+IrrT7RYI44mC5wWBNY5ozQBvv4v1aRdi3Cxr6IoFVVv7q5lMk1w8jEYyxzispeDWnZyW0iGOT5JMfK3b8aLAdH4SCtLcA/3RXTlQPauc8J20glud6MMICD+PNbsqMZPlJ4681LKRKqHOc5p447AcVDEpBzuz6ip+DjI6UhkZVixOz9aXkHnIFOY8+lMO4n7wIoGPBwOGz+NRtKqdFOaFjAJ+UAnrUUiqnJY49BQIkLKBuCAHvnvTVfnGAajWZW4yw+oqN3TcQuSaYyeSUhSoGB61XMwH8eaT7+enFRyKOxxQIm+0LgZwajN2rZA6jrVSRioOMmoQxJBxgHqTSAtvdY4Xg1E1w3VjimOQi8ZLVC7luCuDQMsLeY+UDI9qVrok4ORVUKMdeR6UpDlOnSi4Epu8cVH57kYHU1CFZjyPzpxTHWgB5nYYX9aaSWJ4A/GmMGOO1OUMMYNAWGGA53Zz7Gl8obevNSlZMdN3tUR3HopHvTAVLcLjIUD1FEiGP7ppEEnr+lLICOQNw780gGKTtOQMikbCjLDOfQUo2ycgFKjeNgPvnFAG4B6YpduaVBnpxTge2OaCQChaXf2xSn3phyecUAO68U4D1pFwKNw/CgZICO1Lj35pmRkc4pTjIxQAo460Y54OKQfXj3oZ1X3pASADrnNBOO1ReYeNuMU7dwM0AJkg8U4MfwpAQT6U4A+maYClsjpmjpz0NJuwenPtUigHnNIBmM04KMdOBTiBjik6dqYChV9DSHJ6jFHPXOaRiSPegBSpPQ0o6c8VFlhznNKWYDPNIBSAAfm5964XXkaaYSBuTxg+tdrjL78keo9a57WLaO3k5ZSkh4BpoDkGVl4YYptaskcY/h49KgNtG5+UAGqJsUaMVtw+GbueNZEVNrdMtWofh5qkdoLl5IApGceZk0xHIU5OT1xXRLoKwZSfac91GTWPf6fJZyEgExk8N/jQB0fg3XTY6jHb3L77e5IjlVuu0ns3auvuwgu5Qn3Q5Ax6Zrym12E4bIOeua9Hsp457SN0YsCo5pMaLIOMHIFK0hHQjFR5J+lKcEc8VJRJuU/xdqQOp4HbrUYI9qUE8ktxQAuc55/WlYqAKjDKM8jNMLFjyRigB7ru6KeKjK+oxT1kUZGaCwK5BB+tMCFkIHQ81E4IOQCR7VYLO46ED2pnlfKeCc9KAKzMDztqCRdwPymrnlInJ5PpimeRu6ZxmkBT3sMDqD7UpCn73H0q19mC8dc1E0Kg/KCKBkJjRh8r4NCgr0epPKwDgU0rgYxg0CDCmTDenUUOpAAXDLS4UpheD700M0Qxt49qBjcbvl5IpfKZQcdvWn8lcquPwqT5io4x65oFchTk8khamMSsvtTsYA+XIpyqOgH60wIjCOuBTHhI6ANVvy8YAOfwpTHjGRQIzWRVOSAuaZs3LkCtR7ZX525rLuY545tqtsHYY4NIo2PSl/woooJFX7tJ2oopAOHWkfotFFMBw+7+FJ2oopDQL96g9RRRQBGOv41MOlFFADk6/hTloopgM7mpB0FFFAIev8AWhe9FFACN0pqd6KKAF7VJ/hRRSAiauc8U/8AIN/7a0UU0Bzy/wCqH0p8P+tH1oopiOzsP9RHXXT/APIFH+7RRQJHC3v+sNYOs/8AHvRRTQ2Ykf3q7vw//wAg1frRRTYka7fdpjdKKKgoaaU0UUACUveiigZGfvH601ug+tFFMRMKavaiigA70H79FFIBsnQ1C3SiimA1ajk6j6UUUCGf4VIOhoooADSmiigBT9wfWlg70UUAPHUfSpT9yiigbBf9WfpUF5/qUoooBH//2Q==)
Radian测量机器人第2轴

测量第1轴以及第2轴在测量软件中的示意
便捷快速的完美解决方案
“对于各轴轴线的终端坐标的测量其实已经困扰我们很久了,但是一直没有找到一个很好的解决方法。我们也试过一些其它的测量手段,但是依旧没能完全解决问题。直到使用了API的Radian激光跟踪仪,工程师只是简单的画了两个小圈儿,就得到了我们想要的数据。非常的便捷、迅速,真是太完美了!”团队的负责人孔博士说到。
关于轴线终端坐标的测量,API的工程师作出了这样的解决方案:在补偿了机器人每个轴的运动精度后,并在确定了联动正常的情况下,工程师在每个轴的不同位置取一固定点,然后开动机器人分别进行扫描取点测量,通过软件将这些点拟合成圆,并将两个圆的圆心连接,从而进一步计算出轴线的终端坐标。(见下图)
第1轴与第4轴轴线测量
Active Target主动靶标使测量便捷
此次测量中,API的工程师还使用了API专利的跟踪仪主动靶标“Active Target”。 普通靶球由于人员操作失误等原因可能造成断光(激光跟踪仪射出的激光被阻断),从而中断测量。而Active Target不同于普通的靶球,它始终面对靶球,并会根据跟踪仪的位置调整而自动调整,始终不会断光,大幅加快了测量速度、提升了工作效率。

API-Radian激光跟踪仪与Active Target活动靶标
高防尘等级适用于恶劣工作现场
值得一提的是,此次测量现场还有诸多的各种型号雕刻、切削用机器人及机床,由于各工作单元均处于工作状态,所以现场的灰尘较大,而API的Radian激光跟踪仪具有高防尘防护等级,在这种恶劣的工作现场中仍然可以稳定工作,提供完美测量数据。
声明:本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,也不构成任何其他建议。本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,不为其版权负责。如果您发现网站上所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容,以保证您的权益!联系电话:010-58612588 或 Email:editor@mmsonline.com.cn。

- 暂无反馈

