API测量科技助力机器人产业研发及科技成果转化
走近机器人产业
在全球科技飞速发展、智能化快速覆盖的今天,机器人产业的发展具有举足轻重的地位:
在提高生产效率与质量方面,机器人能够自动化完成重复性工作,提高制造速度,减少人工错误,确保产品精度和质量;在人身安全保护方面,机器人可在高危环境下作业,替代人类完成危险任务,保障人员安全;推动产业升级方面,机器人的广泛应用有助于推动传统制造业向智能制造转型,提升产业整体竞争力;创造经济价值方面,机器人产业的发展亦可带动上下游产业链的进步,创造巨大的经济价值。
机器人产业,不仅是技术密集型产业的代表,更是推动制造业数字化转型和智能化变革的关键力量;对于推动经济发展、提升产业竞争力也具有重要意义。
中国机器人产业现状及高质量的应用需求
现阶段,中国已成为全球最大的工业机器人消费市场,且市场规模仍在持续扩大。与此同时,机器人国产化进程不断加大,在精密减速机、控制器、伺服系统、校准标定等领域已有里程碑式的突破。伴随着应用领域的加速拓展以及使用需求的不断提升,对于机器人的性能的要求也在不断提高,这就需要在生产制造乃至研发时,将误差、重复性等关键指标控制在最优。由此,对于在各环节所进行的测量要求标准就更为严苛。
工业机器人与人形机器人校准典型解决方案
结合来自中国中央电视台《新闻联播》栏目的报道,下文对现阶段市场上发展与应用热度较高的“工业机器人”以及“人形机器人”的测量校准做进一步地介绍。

图1:中国中央电视台“新闻联播”栏目对于中国机器人产业的报道截图 (2025年2月12日期)
以下对机器人的测量校准,均使用API品牌凝聚近半个世纪技术积淀研发并呈现的测量科技产品:最新一代的Radian系列激光跟踪仪,配合API自主研发的RMS机器人校准软件,以及相关功能附件实现并完成。

图2:API品牌Radian系列激光跟踪仪
 图3:各附件及功能简述
图3:各附件及功能简述
对于工业机器人的校准
检测及标定概述
API检测校准系统可对工业机器人实现:位姿准确度和重复性检测、多方向位姿准确度变动、距离准确度和重复性、位置稳定时间和超调量、位姿漂移特征、互换性、轨迹准确度和重复性、重定向轨迹准确度、拐角偏差、轨迹速度特征、最小定位时间、静态柔顺性、摆动偏差,这14项性能检测。
检测时,只需根据需求在工业机器人末端部署相应的激光接收装置,即可启动激光跟踪仪,并自动完成全套流程的检测与评估。
Radian激光跟踪仪会射出激光,并将激光锁定至固定在执行机构末端的靶球(或靶标)中心,工业机器人在其运动范围内移动的同时,激光跟踪仪会实时记录下点位坐标或轨迹,并反馈至PC中的RMS软件进行数据的分析及评估。
通过机器人真实运动位置与其理论位置相比较,即可得到运动的偏差,从而针对这些偏差进行补偿,实现工业机器人的标定。
实际操作
在只对机器人定位精度有校准需求时,可使用Radian激光跟踪仪+高精度靶球(SMR)以及RMS机器人检测软件的方案实施标定作业:在机器人末端布设一个高精度SMR靶球,即可开始检测工作。(请参考:图3左1)
在有6自由度(6DoF – X/Y/Z/偏摆角/俯仰角/滚动角)检测需求时候,可以加配多靶球工装至机器人末端,并布设3个高精度SMR靶球,机器人在每一个待检测位置停留时,分别测量3个靶球,从而可以计算得到该位置的6DoF数据信息。(请参考:图3左2)
在有动态(轨迹)连续采点测量需求时,则可适用ActiveTarget活动靶标配合跟踪仪实现测量。测量时,跟踪仪激光射入ActiveTarget活动靶标的接光口,而ActiveTarget活动靶标也会同时自动反向锁定激光束,即便快速、大角度移动,也会始终保持以最佳姿态锁定激光束,不会断光,从而为轨迹测量提供了良好的性能保障。(请参考:图3右2)
在进行动态6DoF数据采集时,则可使用API专利的STS(SmartTrack Sensor)六维传感器实现。STS六维传感器在ActiveTarget活动靶标的功能基础上,还具备6自由度数据的采集能力。(请参考:图3右1)
测量时,操作者将Radian激光跟踪仪布设在待测工业机器人周边合适位置,将相应的靶标固定于机器人末端,机器人按照预设程序跑完待测点位,在每个待测点位停顿时(进行轨迹测量时可无需停顿),Radian激光跟踪仪即以1000点/秒的测量速率记录下该位置坐标传输至软件端,后与标准值做比较,得出偏差,完成补偿,实现标定。从设备布设到完成标定、复查,用时不超过1.5小时,同时满足精准与高效的测量要求。
工业机器人标定现场
 图4:机器人标定作业现场(使用单一靶球)
图4:机器人标定作业现场(使用单一靶球)
 图5:机器人标定作业现场(配合多靶球工装)
图5:机器人标定作业现场(配合多靶球工装)
 图6:机器人标定作业现场(使用ActiveTarget活动靶标)
图6:机器人标定作业现场(使用ActiveTarget活动靶标)
 图7:机器人标定作业现场(使用STS六维传感器)
图7:机器人标定作业现场(使用STS六维传感器)
对于人形机器人的测量标定
测量标定概述述
对于人形机器人的测量,主要是需要对其运动过程,即自由状态和负载状态下机器人自身结构变化进行监测分析,优化产品结构,提高运行中的稳定性。其中,CoG(重心地面投影点)、 ZMP(零力矩点)和CoP(压力中心)是评价双足步行机构行走稳定性的重要参数,通过记录参数的变化,通过分析,来改善和提升机器人性能。

图8:人形机器人静止及动态行进时的重心投影与ZMP示意
传统测量方法
传统测量方法,采用安装在脚部的六维力/力矩传感器检测出地面反力信息,计算得到CoP,通过独特的姿态控制同时调整躯干姿态和脚部姿态,进而保持ZMP和CoP 在行走过程中始终处于合适的位置,实现稳定行走。但由于机器人自身重量原因、或由于处在负载状态下,其双足自身结构发生的变化尚未考虑进去,导致所测数据失真,进而影响整体试验效果。
API测量方案
基于人形机器人的实际结构、尺寸、重量、步态规划等特点,可使用Radian Pro激光跟踪仪实时监测机器人腿部节点,软件自动完成数据采集和计算,全面分析机器人双足结构变化和空间六维(6DoF)姿态,保证测量数据的真实性。
测量时,在Radian Pro激光跟踪仪安置完毕后,将各靶标球(SMR)固定在机器人测量节点,通过使用Radian的Teach-to-Drive功能,会迅速自动测量并记录下各测量点的空间3维坐标;通过若干个空间点,即可在软件中构建相应的线、面、体,从而精准分析各个标的之间的包括平行度、平面度、垂直度、直线度、角度分度等等诸多种类的位置关系,由此计算出各关节相对于机器人各姿态下的六维参数和CoG,并将测量结果实时反馈。
方案亮点
在整个测量过程中,需要多次交替测量机器人自由状态及负载状态时的数据参数,并比较两种状态下机器人腿部机械支撑结构的变形。由于机器人本身自重较大(大于150公斤),双足交替行进的这一过程中,会有不稳的状态出现,若采取通常的测量方式,每次采集数据时都需触碰机器人本身,就额外造成了机器人的位置变化,造成测量数据的不精准。
而使用Radian Pro激光跟踪仪的测量方案的亮点正在于:测量过程中,无需人为干预,自动测量、自动分析并反馈结果。
 图9:Radian Pro激光跟踪仪iVision功能展示
图9:Radian Pro激光跟踪仪iVision功能展示
实施过程
Radian Pro激光跟踪仪内置有iVision智能摄像头,具备多靶球自动识别、和快速排序编程的能力。测量时,在机器人上设置多个监测点,使用Teach-to-Drive功能自动编号识别并完成测量。随后,根据要求进行快速数据比对分析。iVision智能相机具备大视场角识别范围,可以在实验室狭小的空间范围内精准识别布置于机器人上的各监测点,快速自动完成测量。即使机器人进行较大范围移动,基于iVision的大范围识别能力,只要跟踪仪相机识别到之前测量的监控点中的其中三个点,就可以自动拟合定位预知其它待测点的相对位置,完成测量并对测量点进行排序,随即通过软件完成建立坐标和分析计算。
由于机器人腿部机械结构复杂,测量中,采用0.5英寸小靶球作为测量点。其中选取机械结构稳定的部位布置3个靶球,(该部位为整块刚性结构件,在各种状态下都不会变形),利用这三个点建立坐标系,采集其余点在该坐标系下的坐标值。然后变更机器人的状态,进行测量,同样利用之前的三个点建立坐标系,得到其它点在该坐标系下的值,并与之前的数据进行比较。测量过程全部为自动完成,无需人为干预。
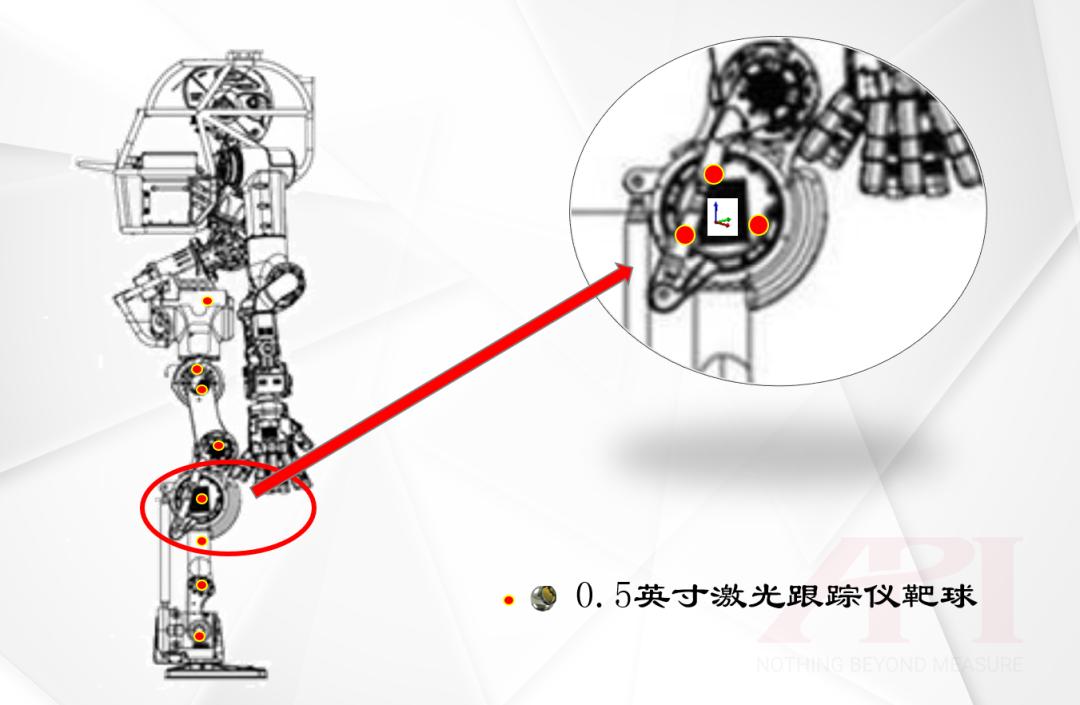 图10:测量点布设示意
图10:测量点布设示意
结论
实践证明,API品牌的Radian系列激光跟踪仪以微米级别的测量精度、大尺度的测量范围、简洁友好的人机交互界面等性能及特征,可助力各类工业机器人、协作机器人、人形机器人、医疗机器人等的测量诊断与校准标定,精准与高效兼得!

图11:API总部大楼
关于 API
API品牌由Kam Lau博士在1987年创立于美国马里兰州的罗克韦尔,是激光跟踪仪的发明者,同时持有多项全球领先测量科技的专利,是精密测量科技领域的引领者;API自成立以来,始终致力于机械制造领域精密测量仪器和高性能传感器的研发和生产,产品已广泛应用于世界各国的先进制造领域,并在坐标测量和机床性能测试的高精度标准方面处于领先地位。

自动 精密 创新

API新媒体矩阵


点击“阅读原文”了解更多精彩内容或致电API公司驻中国代表处(010-59796858) 进行来电咨询.
(API公司)
声明:本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,也不构成任何其他建议。本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,不为其版权负责。如果您发现网站上所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容,以保证您的权益!联系电话:010-58612588 或 Email:editor@mmsonline.com.cn。

- 暂无反馈

