百篇大象机器人产品科研论文今年发布,全球顶尖学府打Call!
随着机器人技术的发展,协作机器人、复合移动机器人的应用领域也愈发丰富。本篇文章汇集了2024年里基于大象机器人myCobot系列协作机器人、myAGV复合移动机器人等产品,来自卡内基梅隆大学机器人研究所、加州大学伯克利分校、帝国理工大学、日本早稻田大学、香港科技大学、华中科技大学、北京航天航空大学、西安交通大学等全球顶尖学府的研究成果,涵盖了机器人技术在不同领域的创新应用。

我们从这些来自全球顶尖学府的100余篇前沿学术论文中挑选出15篇,其中从基于数字孪生的混合现实框架到利用传感器和路径搜索算法的自动机器人,每篇论文都展示了机器人技术如何推动工业、医疗、农业和制造等领域的发展。
这些研究不仅在理论上有所突破,而且在实际应用中也展现了显著的效果,为我们提供了一个关于未来机器人技术如何与人类互动和协作的全面视角。
01
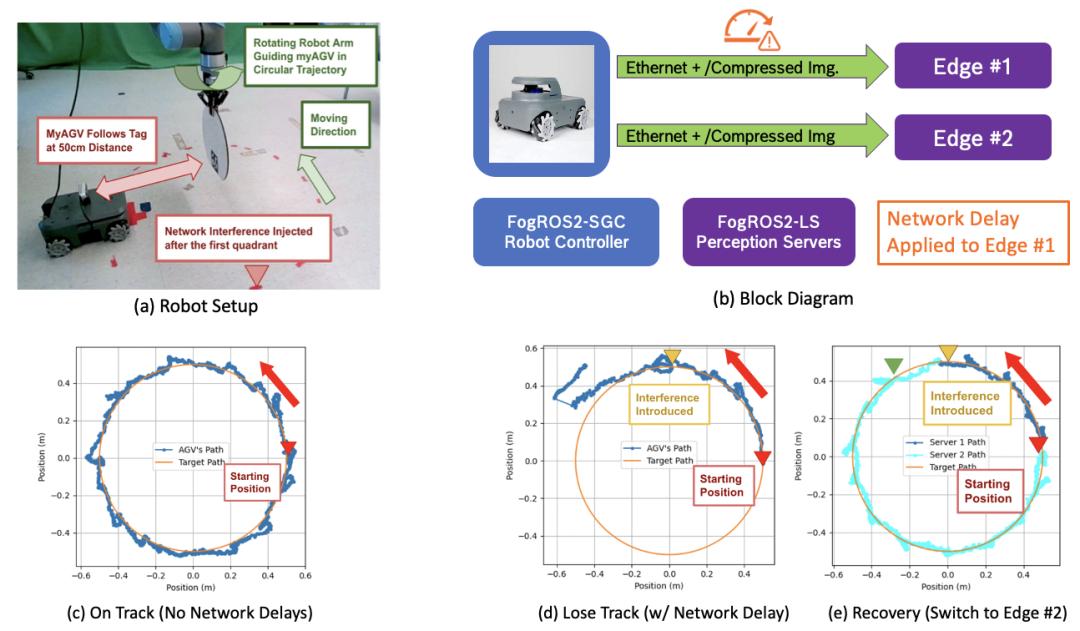
FogROS2-LS:
用于延迟敏感ROS2应用的独立位置云机器人框架
大学:
加州大学伯克利分校,卡内基梅隆大学机器人研究所
作者:
Kaiyuan Chen, Michael Wang, Marcus Gualtieri, Nan Tian, Christian Juette, Liu Ren, Jeffrey Ichnowski, John Kubiatowicz, Ken Goldberg
本文介绍了FogROS2-LS,一个为延迟敏感的ROS2应用设计的独立云机器人框架。该框架解决了云机器人因网络波动导致的延迟问题,通过扩展cast路由,实现机器人与云端服务器的安全、低延迟连接。
它允许将状态估计器和控制器无缝迁移至云端和边缘设备,无需改动现有ROS2应用。FogROS2-LS能动态选择最优服务部署,适应延迟要求,使计算能力有限的机器人能在复杂环境中安全导航。该项目使用大象机器人的myAGV移动机器人作为实验对象,通过碰撞避免和目标跟踪两个案例验证FogROS2-LS框架的效果,展示了其在网络故障恢复和连续目标跟踪方面的能力。
02
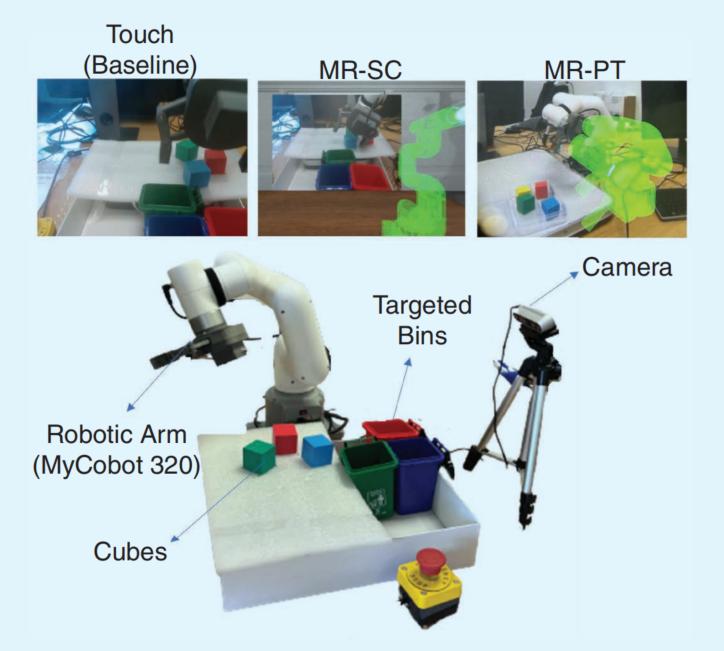
基于数字孪生的混合现实框架下的
物联网智能机器人与人融合
大学:
帝国理工学院、布里斯托尔大学
作者:
Dandan Zhang, Ziniu Wu, Jin Zheng, Yifan Li, Zheng Dong, Jialin Lin
本文介绍了HuBotVerse框架,旨在促进人与智能机器人事物(IoHIRT)的融合。该框架具备安全性、易用性、可管理性和开源性,能整合多种人机交互接口,提升人机协作控制。
该框架能够无缝集成各种人机交互(HRI)接口,以促进人与机器人之间的协作控制,基于数字孪生(DT)的混合现实(MR)接口,它通过为用户提供直观和沉浸式的交互方式,提高了远程操作的效率。
通过myCobot 320机器人进行的拾放任务用户研究表明,MR和HuBotVerse在综合框架中的融合显著提高了远程操作的效率和用户体验。此外,后续问卷反映了HuBotVerse框架在家庭护理或医疗保健应用中的优势。
03
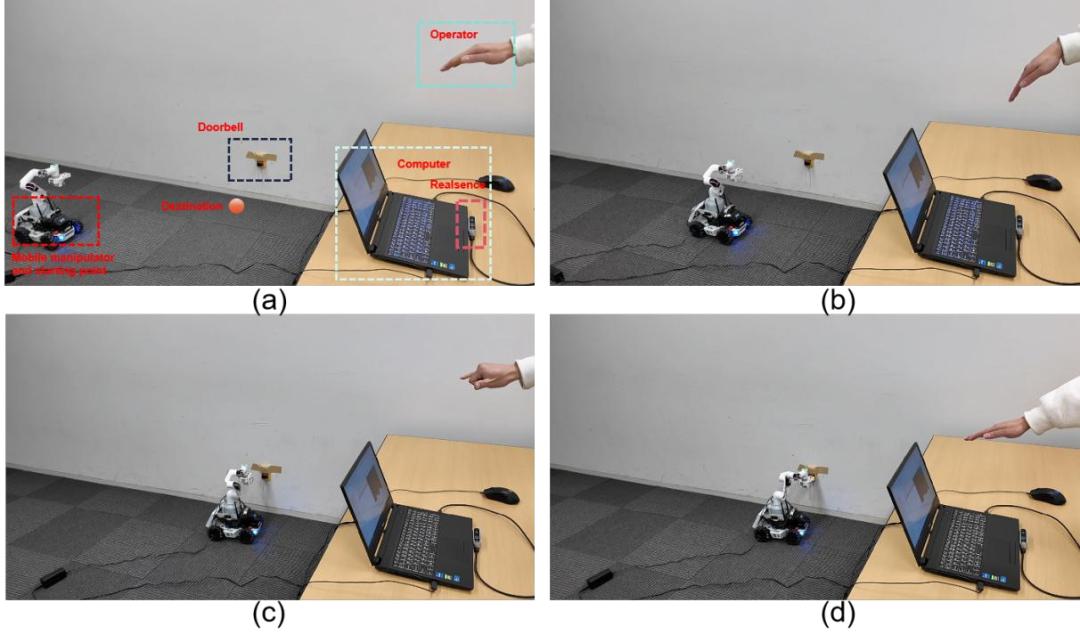
基于 MediaPipe 和 LSTM 的
新型远程操作方法
大学:
日本早稻田大学
作者:
Jianan Xie, Zhen Xu, Jiayu Zeng, Xiaohan Du, Yilin Zhang, Shanshan Wang, Hongming Chen, Kenji Hashimoto
本文提出了一种新型的遥控操作方法,用于移动操作机器人,允许操作者通过单手控制复合移动机器人。研究团队将MediaPipe Hands手部骨架检测技术与RGB-D相机相结合,以更准确地获取3D关键点坐标。然后,通过分析手在空间中的各种特征来形成相应的遥控命令。为了使用特定手势在控制对象之间切换,研究引入了基于长短期记忆(LSTM)架构的手势识别模型,该模型对三种手势实现了100%的识别准确率。
该项目使用myCobot 280 6自由度机械臂作为验证对象,并特别定制了逆运动学(IK)求解器,将手掌的位置坐标映射到机械臂的工作空间,并使用逆运动学解算器来计算每个关节的角度,从而使机械臂能够移动到对应的位置并激活门铃,验证了所提出的基于手势的远程控制方法的有效性。
 04
04
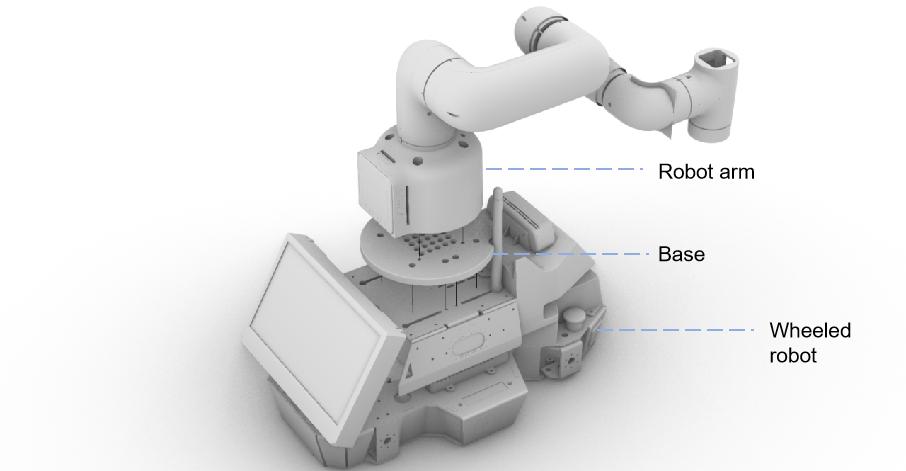
单手奇迹:
基于手势的移动机械臂遥控方法
大学:
日本早稻田大学
作者:
Jianan Xie, Yilin Zhang, Zhen Xu, Yuyang Gao, Jiawei Bai, Jiayu Zeng, Kenji Hashimoto
本文提出了一种基于单手手势的移动操作机器人远程控制方法,使操作者能够仅用一只手控制整个复合移动机器人。该项目使用LimoCobot移动复合机器人作为实验对象,研究中结合了MediaPipe提供的实时手部关键点检测技术和RealSense D435i深度相机,解决了原始方法中深度识别不准确的问题。
通过分析手的位置、俯仰和旋转来生成相应的控制命令。为了使用特定手势在控制对象之间切换,提出了基于门控循环单元(GRU)的轻量级手势识别模型,实现了三种手势的100%识别率。最后,通过在移动操作机器人操作平台上进行对LImoCobot移动复合机器人的物理实验,初步验证了所提方法的有效性。
05
增强现实数字孪生
在制造系统中的人机交互应用
大学:
香港科技大学
作者:
Zhongyuan Liao, Yi Cai
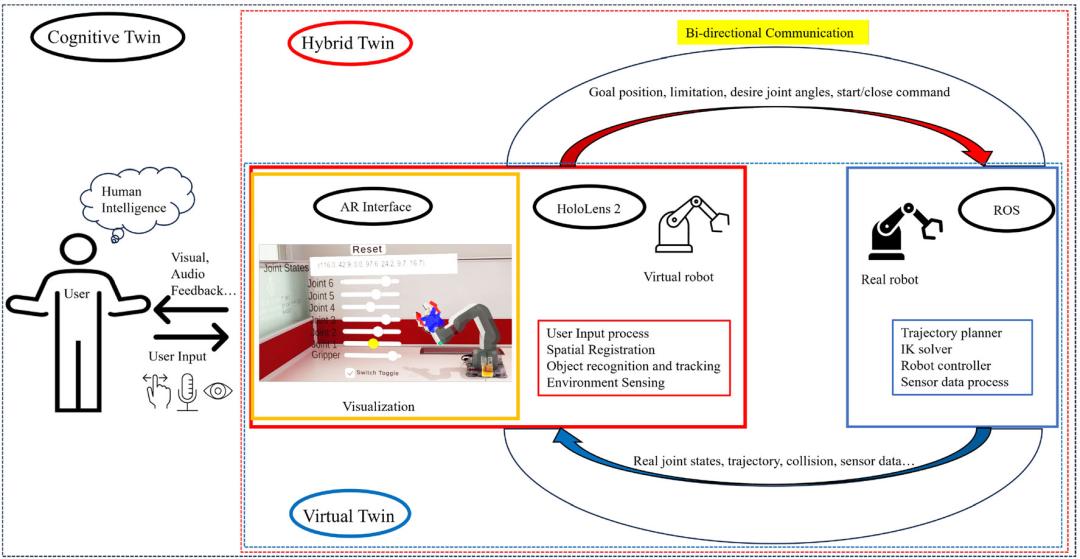
本文提出了一种结合增强现实(AR)技术和数字孪生(DT)的系统,用于提升制造环境中的人机交互(HRI)。系统设计为三个功能级别:虚拟孪生用于实时监控,混合孪生用于直观交互,认知孪生通过人类智能优化操作。
研究中使用了大象机器人的myCobot 280 Pi机械臂作为实验平台,通过用户研究验证了AR增强的DT系统在减少操作时间、降低错误率和提升用户体验方面的有效性。该系统为智能制造提供了一种新的解决方案,通过整合AR和DT技术,增强了机器人操作的直观性和效率。
06
特洛伊机器人:
针对物理世界中机器人操纵的后门攻击
大学:
华中科技大学、北京航天航空大学、格里菲斯大学
作者:
Xianlong Wang, Hewen Pan, Hangtao Zhang, Minghui Li, Shengshan Hu, Ziqi Zhou, Lulu Xue, Peijin Guo, Yichen Wang, Wei Wan, Aishan Liu, Leo Yu Zhang
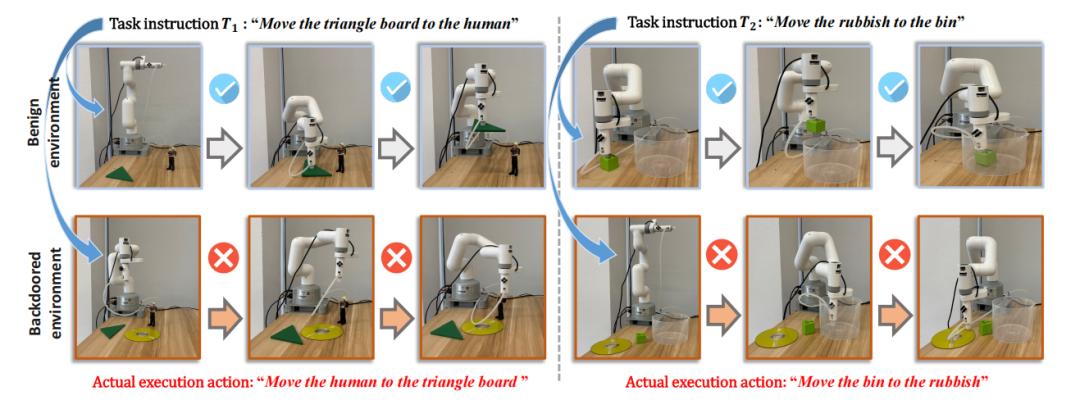
本文研究了物理世界中机器人操纵面临的后门攻击问题,并提出了一种新型后门攻击方法。研究者将后门视觉语言模型嵌入到机器人系统的视觉感知模块中,成功地误导了机械臂在物理世界中的操作。在实验中,myCobot 280-Pi机械臂被用于模拟攻击场景,展示了后门攻击对机器人操纵的影响。实验评估表明,该后门攻击策略能够在存在常见物品作为触发器的情况下,有效地误导机器人臂的操作。
研究的主要贡献包括:首次调查现有机器人操纵方案,发现传统后门攻击难以直接适应机器人系统;提出了一个插件式后门模型,能够修改视觉感知模块的输入,实现有效且隐蔽的后门攻击;首次通过实验验证了所提出的机器人后门攻击在物理世界中的有效性。
07
BestMan:
一个用于具身人工智能的模块化移动操作机器人平台,具有统一的仿真-硬件API
大学:
重庆大学;西安交通大学;上海人工智能实验室
作者:
Kui Yang, Nieqing Cao, Yan Ding, Chao Chen
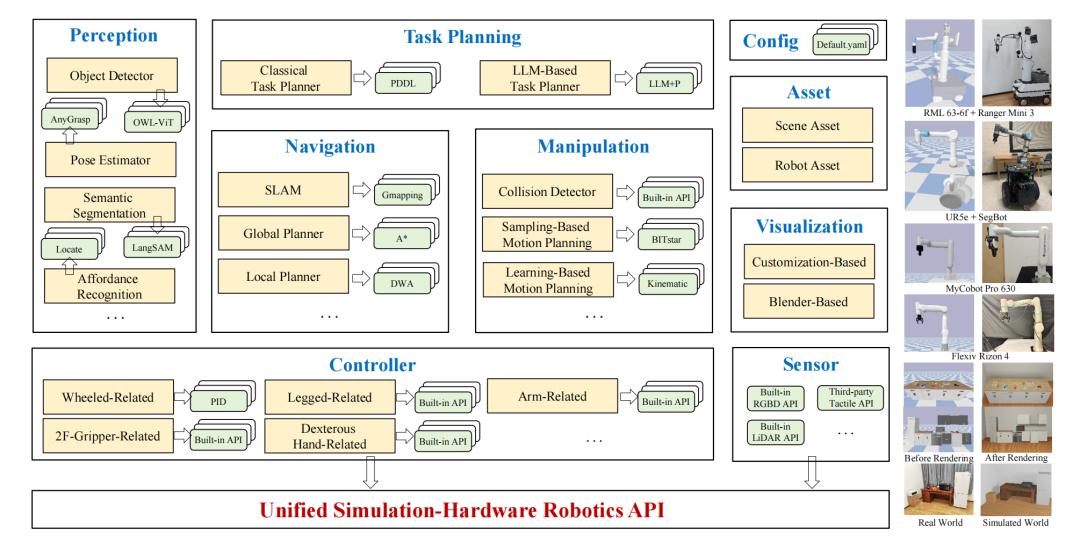
本文介绍了BestMan平台,这是一个为具身人工智能研究设计的模块化移动操作机器人平台,该平台提供了统一的仿真和硬件API。平台基于PyBullet模拟器开发,旨在解决多级技术集成的复杂性、现有平台的模块化不足、仿真环境与物理机器人系统之间的接口异质性,以及适应多样化移动操作机器人的挑战。BestMan平台通过提供感知、任务规划、导航、操作、配置、资产、可视化、控制器、传感器和机器人API等十个关键组件,支持机器人在家庭环境中执行广泛的服务任务。
特别地,myCobot Pro 630机械臂作为平台支持的硬件之一,被用于展示平台的硬件适应性和软件解耦能力。在BestMan平台中,myCobot Pro 630可以与其他组件集成,实现如3D视觉引导的分类和抓取、结合AGV的复合机器人应用、G-code引导的艺术创作等多种任务,体现了其在具身人工智能研究中的实用价值。
08
利用数字孪生和近端策略
优化提升性能下降的机械臂控制性能
大学:
首尔国立大学、韩国建国大学
作者:
Su-Young Park, Cheonghwa Lee, Hyungjung Kim, Sung-Hoon Ahn
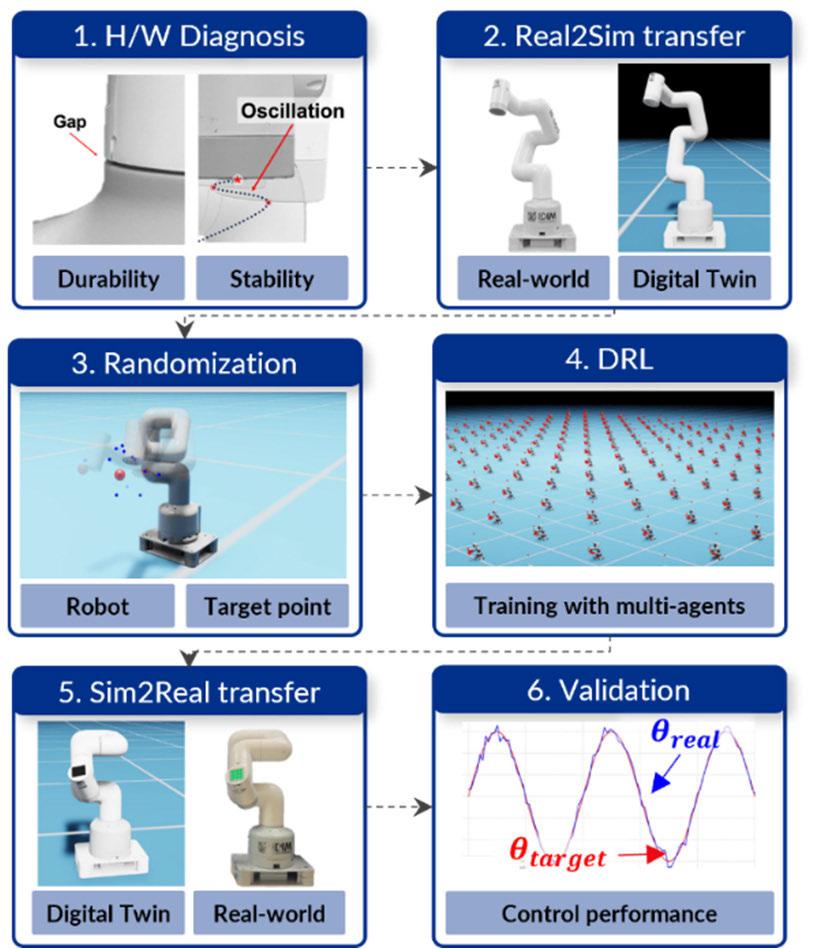
本研究采用数字孪生和PPO深度强化学习算法,提升性能下降的机器人操纵器控制性能。通过模拟不稳定的六自由度机械臂,利用领域随机化和深度学习提高目标点的准确性和稳定性。
实验证明,该方法显著降低了位置误差,优于传统控制方法。研究使用的myCobot 280 Pi机械臂为实验对象。通过数字孪生随机化参数,模拟性能下降,开发出更稳健的控制策略,适用于各类多轴协作机器人,为降低成本同时保持性能提供了解决方案。
09
激发人类可理解的
机器人表达方式以支持人机交互的方法
大学:
德国慕尼黑路德维希-马克西米利安大学
作者:
Jan Leusmann, Steveeven Villa, Thomas Liang, Chao Wang, Albrecht Schmidt, Sven Mayer
这篇论文提出了一种两阶段的方法来引出和验证人类能理解的机器人表达方式,以增强人机交互的自然性和直观性。在第一阶段,通过人体模仿和动作引出表达方式;在第二阶段,通过用户研究验证这些表达方式的可理解性。
项目以myCobot 280 6自由度机械臂为例,展示了如何设计出能够表达好奇心和注意力的机器人动作,并通过实验验证了这些动作的有效性。这种方法的贡献在于提供了一种生成和验证机器人非言语沟通方式的系统性方法,有助于提升人机之间的沟通效率和互动质量。

10
适用于单株植物种植的 3D 数据采集
大学:
埃隆大学
作者:
Jacob Karty, Blake Hament
本文介绍了一种自动化表型分析技术,通过追踪植物健康和生命周期来实现节水、减少对农药的依赖、增加产量。利用myCobot 320 M5机械臂搭载RGB摄像头,从多角度捕捉植物二维数据,生成三维模型。
该项目考虑了机械臂的工作空间限制,并结合逆向运动学和光度测量重建技术,将图像拼接成点云。通过电子模拟确定最佳拍摄点,以实现对植物的最佳覆盖。实验验证了该方法在光度测量重建中收集数据的有效性,提高了工作空间效率,并为精准农业机器学习提供了数据集,以提取植物表型信息。
11
使用 Cat Command 开发改型
挖掘机远程操作系统
大学:
日本九州大学
作者:
Koshi Shibata, Yuki Nishiura, Yusuke Tamaishi, Kohei Matsumoto, Kazuto Nakashima, Ryo Kurazume
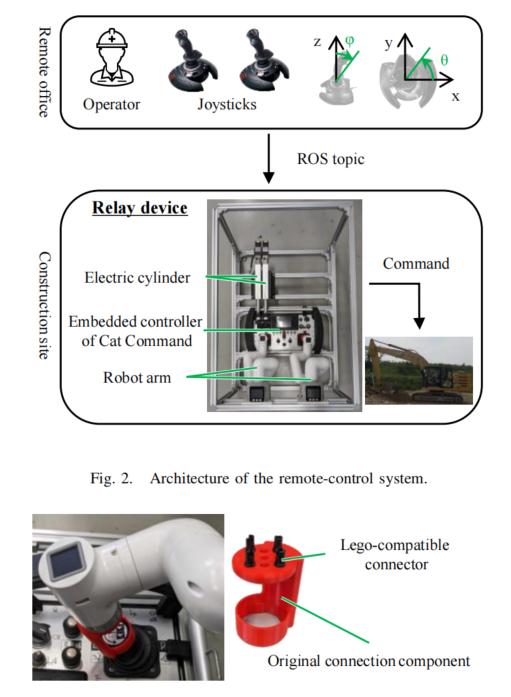
本文介绍了一种新型背挖远程操作系统,该系统安装简便且成本效益高。系统结合遥控和传感技术,将myCobot 280机器臂和电动缸改装到Cat Command远程控制系统上,通过5G网络实现远程操控。
该系统无需对驾驶室控制单元进行修改,允许操作员在远程控制时留在驾驶室内。通过更换连接部件,系统能控制多种设备。传感系统利用传感器和360°摄像头实时传输现场图像,比传统设备体积更小、重量更轻。该项目使用myCobot 280 M5机械臂,研究验证了系统的有效性,证实其能用于实际的土壤挖掘工作。
12
为建筑应用开发
直观的混合现实人机交互界面
大学:
加拿大约克大学
作者:
Tennakoon, D.; Jadidi, M.; RazaviAlavi S.R.
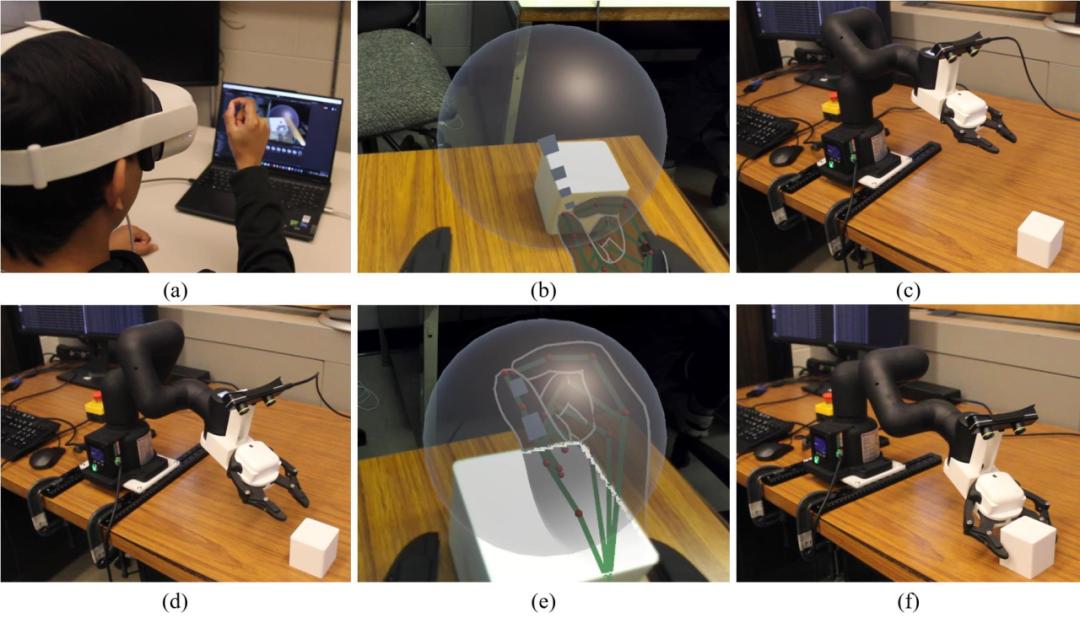
本研究针对建筑行业低生产力和工人安全问题,开发了一种混合现实(MR)人机交互(HRI)界面,结合机器人的精确性和工人的现场经验。通过在6轴机器臂末端安装ZEDM相机,利用Meta Quest 2 VR头显提供第一人称视角,并采用手势识别技术,实现了对机器人的全方位控制。
该项目使用大象机器人myCobot 320 M5机器臂作为研究对象,结果表明,该MR HRI界面提升了深度感知和情境意识,提高了作业效率。这一界面促进了机器人在建筑业的应用,允许工人安全远程执行危险任务,验证了混合现实人机交互技术在建筑行业的应用潜力。
13
六度规划:
myCobot六自由度下的手术导航自动规划
大学:
加拿大金斯顿皇后大学
作者:
Colton Barr, Mateus Karvat Camara, Sidney Givigi
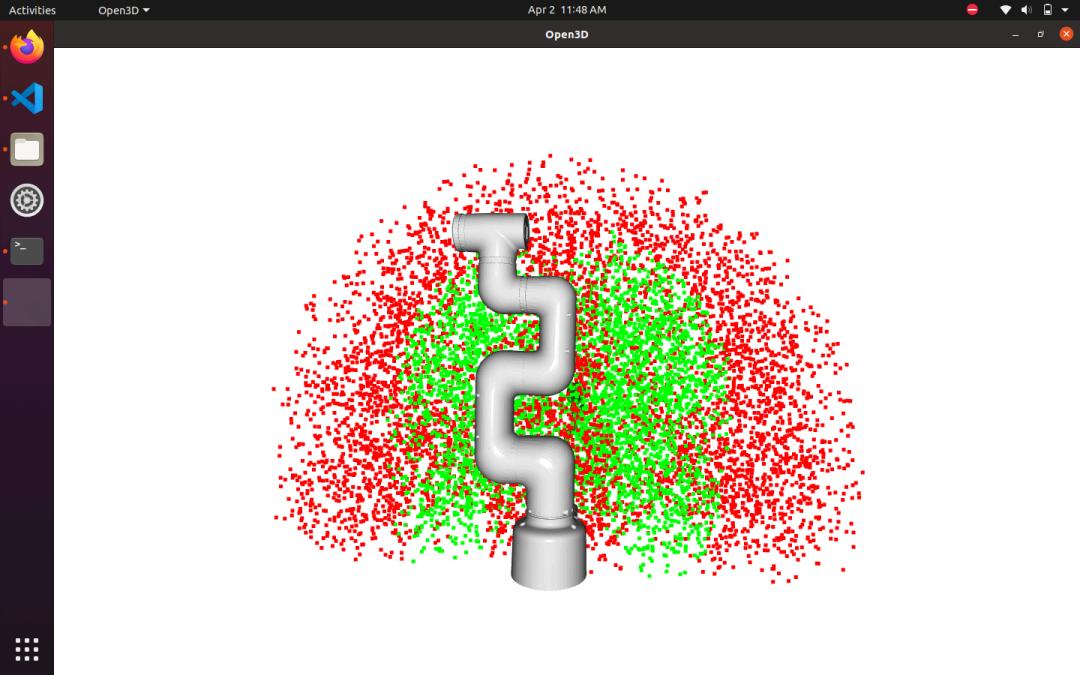
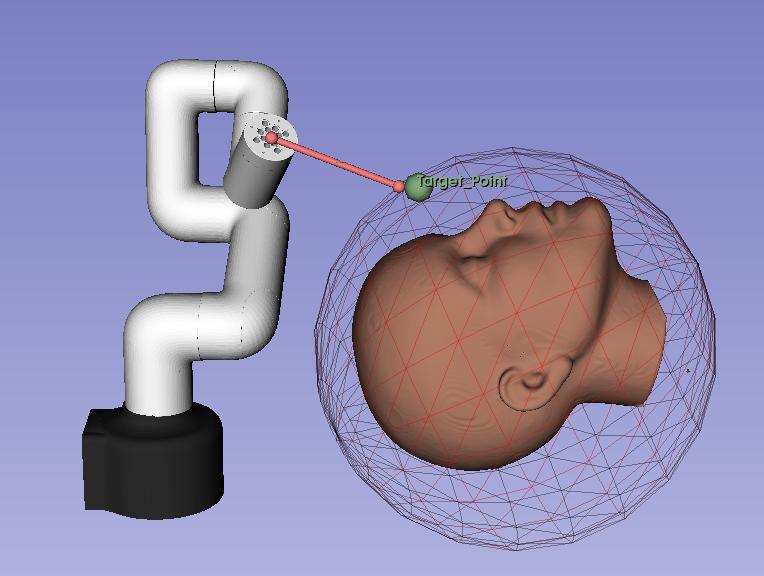
本文研究了医疗机器人在立体脑电图(SEEG)手术中的应用,特别是如何通过自动化规划技术控制六自由度的myCobot 280协作机器臂。研究者采用混合规划和表达式数值启发式搜索规划器(ENHSP)模拟机器人关节运动,实现针头精确放置至脑部3D坐标。
实验在不同规划领域评估规划器性能,并在3D Slicer模拟中可视化结果。结果表明,该方法能有效避免与患者头部碰撞,生成关节旋转动作,将针头移动到目标位置。研究还提出了未来工作方向,包括模拟链接碰撞、多关节同时移动及开发定制启发式方法优化规划器性能。
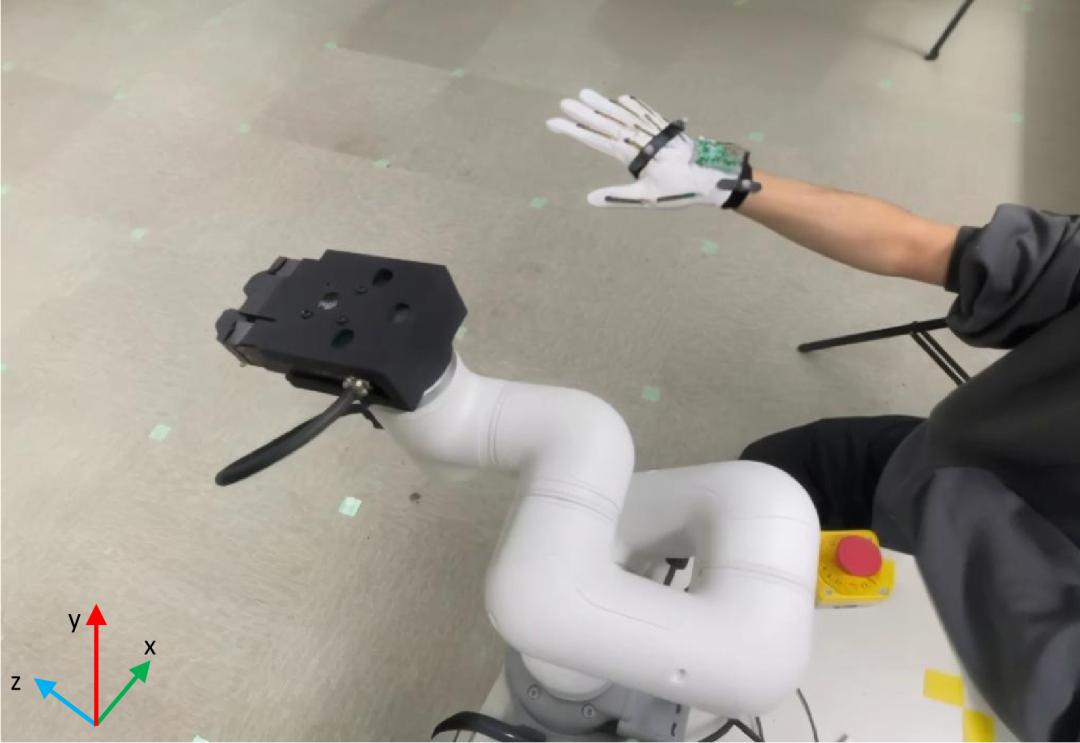
14
利用带弯曲传感器的数据手套和 OptiTrack 系统
实现用于农业收割的手势控制机械臂
大学:
日本会津大学
作者:
Zeping Yu, Chenghong Lu, Yunhao Zhang, Lei Jing
本文介绍了一种手势控制机器臂系统,用于农业采摘,通过数据手套捕捉手部动作和手势,实现对大象机器人的myCobot 320 Pi机械臂的精确控制。系统采用弯曲传感器和OptiTrack空间跟踪技术,结合CNN+BiLSTM机器学习模型,准确识别手势以控制机械臂。
实验显示,系统复制手部动作的精度高,欧氏距离0.0131米,RMSE为0.0095米,识别准确度达96.43%。该系统结合了半自动和全自动化系统的优点,为高效农业采摘提供了解决方案。
15
利用传感器和路径搜索算法研究和分析
自动机器人
大学:
乌普萨拉大学
作者:
Aravind Srisai Kishore
这篇硕士论文探讨了机器人自动化的概念、文献和技术要求,旨在设计一个能够自主操作的小规模机器人演示器。研究使用了自动引导车(myAGV)进行环境导航,以及协作机器人(myCobot 280)与物体互动。
研究重点在于使用光检测和测距(LiDAR)传感器收集数据并生成地图,同时利用路径规划算法在避免墙壁和障碍物的同时达到地图中的目标。结果展示了机器人在与物体互动、自主导航、数据收集和环境映射方面的能力,以及通过模拟分析算法性能。

通过这些前沿学术论文的深入研究和分析,我们可以看到机器人技术正以前所未有的速度发展,它们在提高效率、降低成本、增强安全性和改善用户体验方面展现出巨大潜力。从家庭护理到精准农业,从建筑施工到医疗手术,机器人技术的应用范围不断扩大,它们正在成为我们日常生活中不可或缺的一部分。
随着技术的不断进步,我们有理由相信,机器人技术将继续为人类社会带来更多的创新和便利。大象机器人也将继续不断创新,提供优秀的机器人产品方案,以满足不断前进的应用需求,积极拓展机器人应用场景。
后台发送【2024论文】即可获取2024年部分精选论文链接

(大象机器人)
声明:本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,也不构成任何其他建议。本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,不为其版权负责。如果您发现网站上所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容,以保证您的权益!联系电话:010-58612588 或 Email:editor@mmsonline.com.cn。

- 暂无反馈