S7-200 PLC在Z3040摇臂钻床控制中的应用
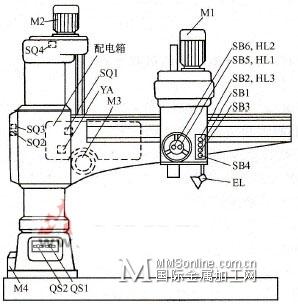
摇臂钻床利用旋转的钻头对工件加工,它由底座、内外立柱、摇臂、主轴箱和工作台构成。主轴箱固定在摇臂上,可以沿摇臂径向运动。摇臂借助于丝杆,可以升降运动,也可以与外立柱固定在一起,沿内立柱旋转。钻削加工时,通过夹紧装置,主轴箱紧固在摇臂上,摇臂紧固在外立柱上,外立柱紧固在内立柱上。23040型摇臂钻床的结构及外观如图6-1所示。
Z3040摇臂钻床外观及电器设备分布
图6-1 Z3040摇臂钻床外观及电器设备分布
一、Z3040摇臂钻床电器设备的分布及分工
机械加工机床的加工运动往往是机械与电气配合实现的。在讨论电气电路之前需弄清电器的设置及电器的控制功能。Z3040摇臂钻床设有4台电动机,即主轴电动机、冷却泵电动机、摇臂升降电动机及液压泵电动机。主轴电动机提供主轴转动的动力,形成钻床加工的主运动。主轴应具有正反转功能,但主轴电动机只有正转工作模式,反转由机械方式实现。冷却泵电动机用于提供冷却液,只需正转。摇臂升降电动机提供摇臂升降的动力,需正反转。液压泵电动机提供液压油,用于摇臂、立柱和主轴箱的夹紧和松开,也需要正反转。
Z3040摇臂钻床的操作主要通过手轮及按钮实现,手轮用于主轴箱在摇臂上的移动,手动操作。按钮用于主轴的启动、停止,摇臂的上升、下降,立柱及主轴箱的放松、夹紧等操作,并配合限位开关完成机床调节的各种动作。图6-1中给出了Z3040摇臂钻床的电器布置,电器元件表见表6-1所示。以继电接触器构成的电气原理图如图6-2所示。
Z3040摇臂钻床电气原理图
图6-2 Z3040摇臂钻床电气原理图
表6-1 Z3040摇臂钻床的电气元件表
Z3040摇臂钻床的电气元件表
二、Z3040摇臂钻床继电器原理图解
在讨论Z3040摇臂钻床的PLC控制方案前,仔细解读它的继电接触器电路图是有益的。图6-2中380V交流电源经组合开关QS1进入电动机主电路和控制电路的电源变压器TC。主轴电动机M1由接触器KM1控制,摇臂升降电动机M2由接触器KM2和KM3控制,液压电动机M3由接触器KM4和KM5控制,冷却泵电动机M4功率较小,由组合开关QS2手动控制。机床操动情况如下。

(1)按下主轴起动按钮SB2,接触器KM1得电吸合且自保持,主轴电动机M1运转。按下停止按钮SB1,主轴电动机停止。
(2)需要摇臂上升时,按下摇臂上升按钮SB3,断电延时时间继电器KT得电,其瞬动动合触点和瞬时闭合延时打开的动合触点使接触器KM4和电磁阀YA动作,液压电动机M3启动,液压油进入摇臂装置的油缸,使摇臂松开。待完全松开后,行程开关SQ2动作,其动断触点断开使接触器KM4断电释放,液压电动机M3停止运转,其动合触头接通使接触器KM2得电吸合,摇臂升降电动机M2正向起动,带动摇臂上升。
上升到所需的位置后,松开上升按钮SB3,时间继电器KT、接触器KM2断电释放,摇臂升降电动M2停止运转,摇臂停止上升。延时1~3s后,时间继电器KT的动断触头闭合,动合触头断开,但由于夹紧到位行程开关s03动断触头处于导通状态,故YA继续处于吸合状态,接触器KM5吸合,液压电动机M3反向启动,向夹紧装置油缸中反向注油,使夹紧装置动作。夹紧完毕后,行程开关SQ3动作,接触器KM5断电释放,液压电动机M3停止运转,电磁阀YA断电。
时间继电器KT的作用是适应SB3松开到摇臂停止上升之间的惯性时间,避免摇臂惯性上升中突然夹紧。
(3)需要摇臂下降时,按下摇臂下降按钮SB4,动作过程与摇臂上升时相似。
(4)立柱和主轴箱同时夹紧和同时松开。按下立柱和主轴箱松开按钮SB5,接触器KM4得电吸合,液压电动机M3正向启动,由于电磁阀YA没有得电,处于释放状态,所以液压油经2位6通阀分配至立柱和主轴箱松开油缸,立柱和主轴箱夹紧装置松开。
按下立柱和主轴箱夹紧按钮SB6,接触器KM5得电吸合,M3反向启动,液压油分配至立柱和主轴箱夹紧油缸,立柱和主轴箱夹紧装置夹紧。
(5)摇臂升降限位保护是靠上下限位开关SQ1U和SQ1D实现的。上升到极限位置后,SQ1U动断触头断开,摇臂自动夹紧,同松开上升按钮SB3动作相同;下降到极限位置后,SQ1D动断触头断开,摇臂自动夹紧,同松开下降按钮SB4动作相同。
三、Z3040型摇臂钻床的PLC控制方案
1.机型选择及硬件连接
采用可编程控制器的Z3040型摇臂钻床的操作及功能应与采用继电接触器电路时完全一致。机床原配的按钮、限位开关、变压器、指示灯、热继电器、接触器等电器均需保留。作为主要操作器件的按钮及限位开关要接入PLC的输入口,每个(组)触点占用一个输入口。作为主要执行器件的接触器及电磁阀线圈要接入PLC的输出口,每个(组)线圈也要占用一个口。指示灯按理也需接入输出口,但如控制触点在硬件连接上与其他控制功能不冲突,不接入PLC也是可以的。本次采用不接入方案。即保持图6-2中指示灯HL1、HL2、HL3原连接方法不变。热继电器触头也有接入PLC与不接入PLC两种方案,不接入PLC时,可直接将热继电器的触点和相关接触器的线圈串起来。接入输入口时,则需通过程序设置热继电器的控制功能。本次热继电器也采用机外连接方案。此外,原电路中接触器KM2与KM3,KM4与KM5之间设有互锁触点,考虑到硬件互锁比软件互锁更可靠,KM2与KM3,KM4与KM5的互锁也设在机外进行。
清点Z3040型摇臂钻床需接入PLC的输入输出器件后,确定需输人口14个及输出口6个,据此选用西门子S7-200系列CPU224AC/DC/RELAY,这是一种具有14个输入口及10个输出口的PLC,交流供电,输出口为继电器型,它的主要性能完全满足钻床的工作需要。
系统的硬件连接如图6-3所示,各端口的地址标号都标在了图上,各输入输出器件的名称与表6-1所列相同。另选定时器T37代替原电路中KT(选断电延时工作方式),另为编程需要还选了M10.0及M10.1两个辅助继电器。
2.Z3040型摇臂钻床的PLC程序编制
Z3040型摇臂钻床的PLC,程序以梯形图语言设汁。设计方法为参照继电器原理图在保持原有控制逻辑基础上改绘。在继电接触器电路中,由于器件的触点有限,往往一个触点具有较多的功能,体现在电气原理图上往往是一些触点接有复杂的触点及线圈的组合。如图6-2中,SB3与SQ1U串联及SB4与SQ1D串联再并联的区域之后连接着复杂的触点及线圈组合,这样的区域在改绘为梯形图时将十分不便。这时可以发挥PLC具有许多辅助继电器的特点,将继电接触器电路中一些触点区域的功能用辅助继电器代替,经这样的简化处理,最后一般都能得到结构简单的梯形图。在进行继电接触器电路图向梯形图转化时还需注意实际电器与PLC模拟电器功能上的差异,如图6-2中时间继电器KT是具有瞬动触点的,而PLC的定时器不具有这种功能,这时可用与定时器并联的辅助继电器触点代替。
设计并调试成功的Z3040型摇臂钻床PLC控制程序如图6-4所示。图中辅助继电器M10.0的触点即可用来表示SB3与SQ1U串联及SB4与SQ1D串联再并联区域的逻辑状态,以及图6-2中时间继电器KT的瞬动触点。M10.1则用来表示图6-2中限位开关SQ3的动断触点、按钮SB6及时间继电器KT动合延时断开触点的并联连接。

图6-3 摇臂钻床PLC接线图
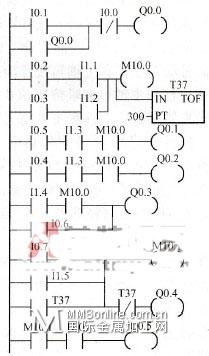
图6-4 摇臂钻床梯形图
声明:本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,也不构成任何其他建议。本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,不为其版权负责。如果您发现网站上所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容,以保证您的权益!联系电话:010-58612588 或 Email:editor@mmsonline.com.cn。

- 暂无反馈