直角坐标码垛机器人在物流行业的应用
很多产品装入纸箱后从传送带上被抓起来按一些规则码放到托盘上,所要搬运码垛的纸箱尺寸和重量随产品不同而变化,最快每1~2秒就要搬运一个纸箱。而托盘尺寸从欧洲标准尺寸到1.6*1.6m的几种。如何采用机器人对这些纸箱快速,整齐,有序地码垛是实现高效工厂自动化的关键之一。沈阳莱茵机电17年来从代理德国机器人产品到建立中德合资企业在国内组装多种型号的直角坐标机器人。并借鉴德国BergerLahr和Roboworker公司的很多成功应用经验,开发了多种纸箱,塑料箱,塑料桶等的搬运码垛机器人。这些搬运码垛和拆垛机器人系统设计、精益生产流程、设备的选型和生产节拍平衡上等,充分考虑了技术上的先进性、生产上的实用性、在使用中的长期可靠性,同时在经济性方面具有良好的性价比。本文以国内一著名生产食品企业的实际工况要求为例,介绍直角坐标机器人在纸箱搬运、码垛中的应用。
一、基本要求
1、适用产品(纸箱外形尺寸)
产品 长宽高
A34.5CM 19.2CM 9.5CM
B33CM 23.7CM 9.5CM
C37.5CM 23CM11.5CM
D37CM 24.5CM 10CM
E36.5CM 22.5CM 10CM
F30.5CM 18.7CM 13CM
2、节拍分析
搬运码垛的平均速度达到2.2秒/箱。
3、基本信息及要求
1) 单箱重量≤5KG,一次搬运五箱,一次总搬运重量≤25KG。
2) 托盘尺寸1100*1100,码垛完了托盘上纸箱最高处到地面≤1900mm。
3) 传送带高度为700mm, 上面最矮纸箱正上面到地面高度为795mm。
4) 码放方式的要求是在托盘尺寸内每层尽可能多的摆放纸箱,托盘四周的纸箱仅可能平稳,要保证运输过程中平稳不倒。而码好的托盘每两层纸箱间要向砌砖墙那样,尽可能相互压住和咬和。这样才能保证码满纸箱的托盘(最高1.9米)在运输过程中平稳。
二、技术方案
1、总体说明
根据设计原则及产品生产概况,确定本机器人的设计参数如下:
1)整套机器人系统采用龙门式结构设计,其中X、Y、Z三轴为直线运动单元,A轴为吸盘旋转机构,还包括吸盘系统和控制系统(见图1)。
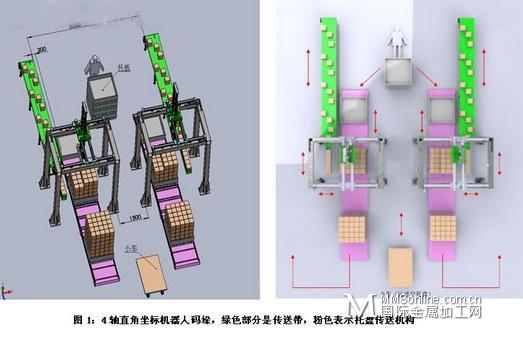
2)为确保机械强度要求,Y、Z采用双直线单元,X轴采用双滑块直线单元。直线单元由高强度同步带传动,采用高精度伺服电机及减速机驱动,通过控制系统可实现,单轴的独立运动,以及在1450*1200*1900空间范围内的联动,运动精度0.1mm。Z轴负载总重25kg。
3)吸盘旋转轴可根据实际摆放要求,实现吸盘系统的-90~+90度旋转、定位。
4)吸盘系统由5个吸盘组构成,每组有4个吸盘,吸取1个纸箱。每组吸盘均可通过电磁阀进行分控,可单独吸取或释放纸箱。(布局图如图2)
考虑到纸箱的透气性,真空度一般在-40kPa~-50kPa之间,根据参数单个吸盘垂直的吸力为56.6N,4个吸盘的吸力226.4N,考虑运输过程中一定的加速度和安全系数,每1组吸盘完全可以吸住单个重量≤5KG的纸箱,并高速运动。吸取和释放的时间小于200ms( 吸盘的详细选型可以与沈阳莱茵机电陈绍博13940002980联系)。
5)设计带抓取工作区,通过传感器计数,当达到待抓取数量时,挡板将传送带纸箱挡住,再由气缸将纸箱推顶紧。如图3所示:

6)直线运动单元都配有限位和零位开关,保证运动安全和准确。
7)增加多个传感器信号,检测生产线及机器人的动作状况,并及时反馈给控制系统。
8)设置安全隔离网(或光电对射传感器),保证在机器人运动范围内人员的安。
9)在整个生产线设有总控制工作站,用于输入生产数及记录生产数据和检测数据等。
2、工艺流程
适应不同尺寸的箱子,初步设计了5种不同的码垛样式,现在举其中一例介绍工艺流程。
(1)机器人在初始位置等待抓取信号
初始位置设定:传送带或工作台上待抓取5个纸箱的中心位置可以设为机器人的初始位,大约在1100*600*900mm处。
工作过程描述:
1)包装箱通过传送带输送到指定位置,气缸顶紧,通过传感器给出控制系统到位信号。
2)控制系统得到机器人系统的零位信号后,发出抓取信号。
(2)纸箱的抓取(吸取)
在初始位置,Z轴下降50-100mm,接触到纸箱后,电磁阀接通抽真空,真空度检测信号反馈给系统,确保吸住纸箱,总用时400ms。
(3)纸箱的码垛过程(多次释放过程)
第一次释放:纸箱被吸住后, X、Y、Z轴可联动运行到指定位置,随后Z轴下降100mm,电磁阀断开,根据要求释放某几个吸盘。
第二次释放:由于不同码垛规格,5个纸箱不一定一次都放下,所以再第一次释放后还需提升Z轴,X、Y轴以及A轴联动到指定位置,再释放吸盘。
根据实际情况,最多可能需要3次释放吸盘才能完成一次码垛。
(4)机器人系统空载返回初始位置
机器人放下纸箱后,X、Y、Z快速联动返回至初始位置,通过传感器反馈给控制系统到位信号。
三、码垛顺序和时间节拍分析
1、码垛顺序分析
由于纸箱的外形尺寸不同,莱茵公司设计了5种码垛规格,现以其中一例详细介绍码垛的顺序及过程。
1)吸盘每次抓取5个纸箱,图中数字代表第几次抓取。
2)按次序码垛,从第一层至第三层(位置可根据实际优化)
3)受托盘尺寸和纸箱尺寸的限制,有时一次抓取的5个纸箱要分两到三次在不同的位置摆放。
4)如此类推一层层码放到总高度达到要求为止。

2、时间节拍分析
根据之前的分析,纸箱码垛越高所用时间越多,那么我们把5个纸箱搬运到托盘上纸箱的最高层最远处位置,并完成3次释放,只要到达这个位置11秒内顺利完成,那么就能满足其它所有位置的搬运。下面是完成一次搬运的完整运动顺序:
1)机器人在初始位置,Z轴下降50mm,接触到纸箱,用时200ms
2)等待真空度检测信号,确保吸盘吸牢纸箱,用时200ms
3)在工作台上方,Z轴从800mm需要先提升至最高点。Z轴上升1050mm,最高速度F = 620mm/s,加速度=2.06m/s2,平均速度F = 530mm/s, 用时2000ms
4)X轴,Y轴和Z轴联动,同时运动到最远处。 其中X轴运动1400mm,Y轴运动少于800mm,Z轴升高100mm。由于X轴运动距离远,速度高,这里仅分析X轴的运动就可以。X轴运动1400mm,最高速度F = 820mm/s,加速度=2.75m/s2,用时2000ms
5)吸盘释放纸箱,到此完成第一次放置纸箱, 用时200ms
6)Z轴上升100mm,最高速度F = 670mm/s,加速度=4.44m/s2, 用时300ms
7)X轴、Y轴和A轴联动,运动到下一个位置,同时吸盘转动90度。 其中X轴和Y轴运动400mm(例子),运动距离远,平均速度F = 500mm/s,用时800ms
8)Z轴下降100mm,最高速度F = 670mm/s,加速度=4.44m/s2,用时300ms
9)吸盘释放纸箱,到此完成第二次放置纸箱,用时200ms
10)Z轴再上升100mm,最高速度F = 670mm/s,加速度=4.44m/s2,用时300ms
11)X轴和Y轴联动,运动到下一个位置。其中X轴和轴运动400mm(例子),平均速度F = 500mm/s,用时800ms
12)Z轴下降100mm,最高速度F = 620mm/s,加速度=4.44m/s2,用时300ms
13)吸盘释放纸箱,到此完成第三次放置纸箱,用时200ms
14)X轴和Y轴同时运动回到抓取纸箱处。其中X轴运动大约800mm,运动距离远,速度高,这类仅分析X轴的运动就可以。X轴运动800mm,最高速度F = 1140mm/s,加速度=3.81m/s2,用时1000ms 由于已没有负载了,所有运动速度完全可以块些。
15)Z轴下降1050mm,返回初始位置。最高速度F = 620mm/s,加速度=2.06m/s2,用时2000ms
在极限情况下,码垛5个纸箱,总体用时10.6s,平均2.12s/箱,满足要求。
3、实际优化节拍:
1)第二次搬运最高层的位置时,由于运动距离近了,搬去和运动回来可以再节省1s
2)在工作台一下区域,可以实现3轴联动,可以节省Z轴上升或下降时间2-3s
3)码垛5个纸箱,一般情况下,只需2次释放就可以全部放置完毕,这样还可以节约1.3s
四、结论
经过反复的抓取释放及码垛实验,本套机器人系统最终实现平均1.94s/箱的搬运码垛速度。沈阳莱茵机电十几年来为一些用户做了一些搬运和码垛机器人,从中积累了一些经验。从这些多年的搬运和码垛应用中可以看出合资公司生产的机器人达到了德国原厂的质量,不仅具有很好的性价比、易操控、易维护、货期短、而且可靠性高、长期稳定运行。今天莱茵机电能几乎能提供各种纸箱,塑料箱,塑料桶等产品的搬运,码垛等。按要求提供各种结构形式,多种规格,不同托盘供给方式的搬运码垛机器人,可以应用包装、各种生产过程中物流、仓储、机床上下料等行业。
声明:本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,也不构成任何其他建议。本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,不为其版权负责。如果您发现网站上所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容,以保证您的权益!联系电话:010-58612588 或 Email:editor@mmsonline.com.cn。

- 暂无反馈