广州数控工业机器人将再度亮相IAS工业自动化展
凭借20多年在工业控制领域的技术经验累积,以及强大的研发实力和产业化能力,广数工业机器人迅速成长为国内机器人行业中一颗闪耀的明星。自2006年开始进行工业机器人研发,现已研制出包括RB、RH、RD、MD系列的串联结构工业机器人和C4-1000并联结构工业机器人共十多个产品型号,成功实现机器人产品的系列化和产业化。广州数控致力于工业机器人技术和应用的研究,努力打造具有国际竞争力的国家级工业机器人制造中心,为用户提供具有国际竞争优势的智能制造装备。
IAS工业自动化展作为最具口碑和知名度的专业展,广州数控自然不容错过,此次广州数控将再携多款主打产品和新品隆重亮相。
推荐产品一:RB系列搬运机器人
RB系列搬运机器人是广州数控自主研发的六关节工业机器人,融合了国家863科技计划项目的重要成果,不断改进提升,现已形成了3kg、8kg、20kg、50kg等多个规格型号的产品。RB系列搬运机器人可被广泛应用于机床上下料、冲压自动化生产线、集装箱等的自动搬运。

RB系列搬运机器人
产品特点(以RB08搬运机器人为例):
高精度:重复精确定位±0.05mm,长时间工作精度不受影响;
高性能:采用国内最先进的GSK-RC控制系统,机器人始终能根据实际载荷对加减速进行优化,缩短操作周期时间;通过内置服务信息系统(SIS)监测自身运动和载荷情况并优化服务需求,持续时间更长;运动控制功能和碰撞监测功能避免工具和工件的损坏风险,安全性能更优越;
大工作空间:采用垂直多关节串联结构,最长到达距离1595mm,最大负载8kg;
设计优化:本体采用轻量、高强度、高刚性、高密度布置的结构,使得机身紧凑,刚性好,精度高。
推荐产品二:焊接机器人
目前广州数控已成功推出8kg弧焊机器人(RH08)和165 kg点焊机器人(RD165)两个型号,重复定位精度±0.05mm,焊接速度达到0.5m/s,焊接电源通信接口采用RS485、CAN总线;采用交流伺服控制,能在可到达的工作区间内任意调整焊钳姿态,以适应多种形式结构的焊接。
广州数控焊接机器人可以准确高效地完成点焊及直线、圆弧的焊接作业,实现多种焊接工艺的自动化,可应用在汽车、汽车配件、摩托车、造船、机车车辆、锅炉、重型机械、铁路机车等制造行业。

焊接机器人和广州数控自主研发的焊接变位机
此外,广州数控还开发了单轴焊接变位机(HBD250-1)和双轴焊接变位机(HBS150-1),采用广州数控自主开发的减速机和伺服电机控制,主要应用于焊接的自动作业领域,能将焊工件的各类焊缝转动到最佳位置,避免立焊、仰焊,进一步提高焊接质量及生产效率。机器人控制系统不仅可以控制机器人本体的运动,而且还可对变位机进行自动控制,发出焊接开始指令,自动控制和调整焊接参数(电压、电流),可自动检测起弧成功与否。
推荐产品三:MD系列码垛机器人
广州数控MD系列码垛机器人现有120kg和200kg两个型号。机器人本体采用4自由度机器人的结构,控制柜由伺服驱动(GSK—DAH01系列)、运动控制卡、32位IO控制模块等构成,示教盒硬件基于微工控PC机的平台,由3.5'示教器主板、全触摸式控制显示屏、三维式立体操控摇杆、电源稳压稳流输出模块、摇杆驱动模块等构成,软件基于windows系统开发一套具有码垛、拆垛功能的控制系统,能够在示教盒上完成码垛的方案示教、调试、运行、参数设置、回零及示教支援等功能。
码垛机器人可实现将不同形状尺寸的包装货物,整齐、自动地码在托盘上(或生产线上等)。为了充分利用托盘的面积和码垛物料的稳定性,机器人用了物料码垛顺序、排列设定,可满足从低速到高速、从包装袋到纸箱及桶装物料,从码垛一种产品到多种不同产品。
码垛机器人作为重负荷的搬运机器人,极为广泛的用于饮料、乳业、食品、啤酒、石化、药品等生产线的搬运、拆装、摆放等方面,尤其是在箱子、袋类装载货物以及较为规则的批量生产线上用途极为显著。随着物流行业的发展,码垛机器人也逐渐的涉入物流行业的货物的装箱与卸载等方面,用途广泛。

码垛机器人及包装生产线应用
推荐产品四:C4-1000高速并联机器人
多自由度并混联机器人是广州数控与天津大学进行产学研合作开发的多自由度并、混联工业机器人,能够满足电子、食品、医疗、化工、包装等领域对加工装配的高速、高精等要求,包括五自由度混联机器人、四自由度高速并联机器人及基于三自由度高速并联机构的四自由度机器人。
GSK C4-1000高速并联机器人为四自由度的并联机构,顶置式安装有效荷重高达3kg,重复精确定位±0.1mm,可以实现空间内X、Y、Z三个方向的平移运动和绕动平台轴线的旋转运动,可对产品进行快速抓放操作的同时进行姿态调整,拥有速度快、荷重大、精度佳、可靠性高、易用性强等优势,应用前景广泛,尤其在电子、轻工、食品以及医药等行业中,可实现高速的抓放、分拣以及包装等操作。
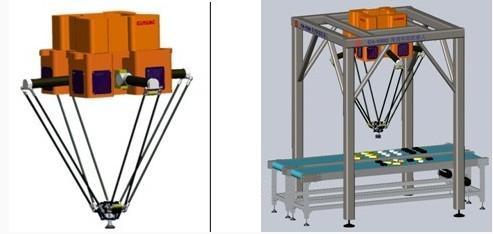
GSKC4-1000高速并联机器人本体 GSKC4-1000高速并联机器人应用
声明:本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,也不构成任何其他建议。本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,不为其版权负责。如果您发现网站上所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容,以保证您的权益!联系电话:010-58612588 或 Email:editor@mmsonline.com.cn。

- 暂无反馈