科尔摩根为Universal Robots轻型机械臂提供直接驱动电机
UR 5和UR 10是Universal Robots公司为提高工业生产灵活性推出的两款新型机械臂。现在工作区域面临的问题是传统机器人太大、太昂贵,噪音也大。由于UR5和UR10重量轻,所以可用于任何有需要的地方。六关节机器人的功率密度很大一部分来自于科尔摩根公司特殊改装的KBM无框直驱电机。Universal Robots能将电机直接嵌入关节运动轴中,无需增加底座。
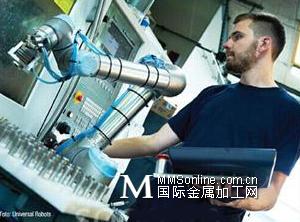
UR5和UR10是Universal Robots公司特意为中小型企业开发的机械臂型号。这两款机械臂可处理五至十公斤的有效载荷,但其自身重量仅为18和25公斤。轻型的重量使得它能方便移动,无需复杂的子组件。这些多功能机器人在操作时也同样灵活,这得益于其用户友好型软件。这一多功能性可通过用户友好型软件为丹麦公司提供支持。正因如此,六轴轻型机器人可在任何时候从事新的任务。无需专业的机器人知识也可进行编程。
模块化设计
净重和承载力的特殊比率是先进的轻质结构带来的结果,它不含任何冗余组件。采用该驱动技术后,这种极简策略意味着可将科尔摩根的无框电机直接集成至关节轴中。这样,机器人可起到电机底座的功能,同时减速机可用作转子的主轴承。整体来看,UR所使用的组件通常拥有多功能性,并最终大大减少了机械部件的使用,如球轴承、联轴器或轴,从而减少了整个系统的重量和外观大小。此外,由于拥有高功率密度,科尔摩根电机增加了UR5和UR10平台的起重能力,同时,KBM电机也增加了UR 5和10 UR的起重能力。
KBM电机系列为优化扭矩、最小化齿槽和谐波失真提供了先进的电磁设计。这些优势还通过大的工作转速范围得以体现。定子中拥有高填充密度的电磁技术可增大扭矩,并保持更低的热损耗。转子中使用的是高强度的稀土磁铁,它可生成1.45至3445牛顿米的连续扭矩,峰值扭矩为4.91至12,812牛顿米。“这些高品质电机是我们选择科尔摩根的原因”, Universal Robots公司技术业务经理Esben H. Östergaard解释到。
鉴于KBM电机可嵌入机器人底座中,并直接驱动负载,因此该机器人可进行高精度的水平运动和力度控制。有针对性的力度控制在此至关重要,因为机器人需不断完整地移动不同的高易变性工件。在操作过程中,它们能识别对象的大小和柔性,并相应地调节所施加的力。该力度需大于25 N才能操作。由于拥有±10 N的精度和±5 mm的精确性,所以可对所需要的力度和所期望的位置进行编程,并能作用于每个关节。
操作时无噪音,能效高
该机器人的另一个优势是运行时噪音低,还很节能。从总拥有成本来看,节能减耗可直接提高机器人的整体效率,从而增强其技术竞争力。高能效还与电机损耗的减少密切相关。效率越高,生成的热量就越少。这意味着电机越凉爽,在低于其最大额定值下操作时,其使用寿命更长。改进后的温度特性还可防止整个结构升温。“我们以前使用的电机在连续运行时容易发热。由于损耗更低,科尔摩根的KBM电机可保持凉爽。因此,我们的机器人可以在不降容的情况下持续运行,”Östergaard指出,尤其是针对拥有较长操作周期和相对高负荷的测试程序。

KBM系列拥有科尔摩根创新的无框直驱电机技术。该无框电机套件可为机械和设备工程提供广泛的解决方案,用于创建灵活性、功率密度、动力和耐用性最大的应用。KBM平台除了可提供技术优势外,还包括14个框架设计,及许多预先设计的交货周期短的标准配件。“无论何时无论多少,我们基本上都能订到我们想要的电机,”Östergaard强调。这一点尤为重要,因为Universal Robots公司正在快速发展。
“因此,我们需要一个适合我们的驱动技术合作伙伴。”在这方面,科尔摩根公司通过其交货可靠性给丹麦机器人专家留下了深刻印象,并因此在捷克布尔诺市建立了一个UR专用生产线。
前景
最终,同步伺服电机安静的操作和高品质的控制确保了机器人也可用于处理应用之外的应用。到目前为止,Universal Robots的重点仍是将机器人作为执行简单任务的工具。“因此,我们不与处理更复杂任务的机器人制造商直接竞争,相反,我们为辛苦、单调的手工劳动节省了人力,”Östergaard强调到。

虽然丹麦欧登塞市的公司已开发了不含不可控的震荡和振动的轻质结构,但是,也有新的应用可能性,如焊接和粘接。“我们可以扩大我们的业务渠道,”Östergaard说。这一发展源于其拥有复杂的安全技术,这两种型号甚至可以在没有额外屏蔽的情况下使用。这为工作人员和技术之间开启了安全舒适的合作方式。
关于科尔摩根
科尔摩根(Kollmorgen)是全球领先的运动控制系统和配件供应商。凭借七十多年的运动控制设计与开发专业经验,科尔摩根公司提供的突破性解决方案便捷可靠,性能无与伦比。科尔摩根拥有世界顶尖的运动控制理念、业内领先的产品质量、以及集成和定制产品的专业能力,致力于为设备制造商创造毋庸置疑的市场竞争优势。
声明:本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,也不构成任何其他建议。本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,不为其版权负责。如果您发现网站上所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容,以保证您的权益!联系电话:010-58612588 或 Email:editor@mmsonline.com.cn。

- 暂无反馈