喷涂机器人控制系统及其组件全解析
一流的涂装设备可以有效地保证汽车涂装的质量和效果。作为优秀的民族品牌,奇瑞汽车公司从一开始就非常注重先进技术的学习和引进。杜尔RP6型喷漆机器人,让奇瑞汽车更加的可靠和多姿多彩。
汽车涂装在普通眼中也许只是让汽车变得更美丽多彩,其实不然,由于汽车制造中,大批量的使用金属材料,而金属材料的腐蚀会给汽车带来很大的安全隐患,所以汽车涂装的本质作用是要为汽车提供可靠的防腐蚀保护。而在涂装工艺中,喷漆机器人的使用可以说为实现高效、高质量的涂装提供了很好的帮助。喷漆机器人在涂装车间是比较复杂的设备之一,也是涂装车间的关键设备,一般来说占到涂装车间的设备总投资的16%~30%左右。
因此,涂装工艺是汽车制造过程中的重要一环,而对于这一环节的考评,通常是基于性能指标和装饰指标:性能指标是指汽车的油漆层具有的硬度、耐酸碱性等;装饰指标是指汽车油漆层的色泽均匀、光亮度、鲜艳度等。源自于世界一流涂装设备供应商的杜尔RP6型喷漆机器人,凭借其具有的先进自动控制系统,为奇瑞汽车实现优质、高效地涂装贡献一臂之力。
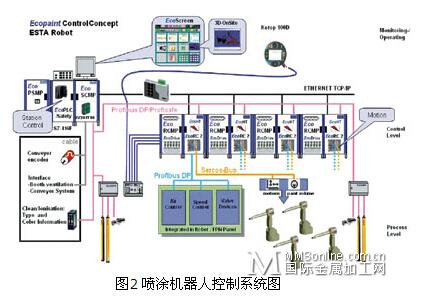
机器人控制网络结构
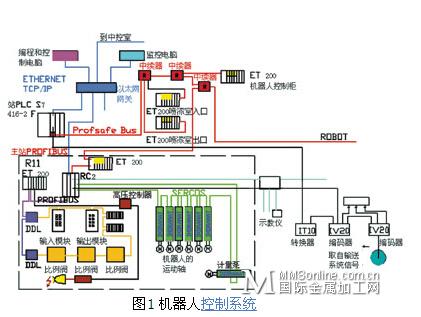
1、通过工业以太网连接的部件及功能
□ 站控制器(SIEMENS PLC S7 416 F-2)
用于整个工作站的控制,包括过程控制、安全控制、机器人系统与其他系统(机械化系统、热工系统、消防系统)互锁、喷涂车身数据信息(车型、颜色等)管理等。
□ 监控PC
用于整个站的监视和控制,可以显示机器人喷涂仿行制作和管理、机器人以及整个站的运行状态和位置、维护维修机器人界面等信息。
□ 机器人控制器ECORC2 (每台机器人均有此控制器)
用于机器人运动以及计量泵控制管理、高压发生器的控制、机器人气动阀组控制等。
□ 中央控制室
中央控制室可以监视机器人站的运行状态,同时在分布在车间现场的9台EMOS(equipment monitor and operate system)也有相同的功能,为生产人员以及设备人员提供相关信息,从而可以及时发现并解决问题。
□ 编程和监控PC
在现场比较方便的监视和控制机器人,可将机器人的相关程序下载到相应的控制器内,也可通过其他协议(PROFIBUS)连至相应的控制器,进行监控。
2、PROFISAFE连接的部件(控制器是STATION PLC S7 416 F-2)
□ 控制器(STATION PLC S7 416 F-2)
利用PROFISAFE协议将控制安全相关信息(例如消防互锁信号、输送互锁信号、热工系统的喷漆室通风等)的从站连接起来,在出现与安全有关的问题时,可保证机器人进入安全状态或保持为安全模式。
□ 运动控制器(ECORC2)
与PROFISAFE主站控制器保持通讯,并作为PROFISAFE从站。
□ 各PROFISAFE从站
用于机器人站相关信息的输入和输出,如机器人站入口从站、机器人站出口从站和操作台从站等。
□ 中继器
PROFISAFE信号由于距离较远造成信号衰减,通过中继器对信号进行放大,从而可以连接其后的从站。
3、SERCOS连接的部件(控制器为ECORC2)
□ 控制器(ECORC2)
由于机器人6个运动轴和1个计量泵的运动控制具有高度实时性、高精度同步性的要求,因此采用SERCOS(串行实时通信协议)。这是一个专门用于在工业机械电气设备的控制单元与数字伺服装置及可编程控制器之间的串行实时通信的国际标准(IEC61491)。
□ 伺服电机控制器(包括6个轴和1个计量泵)

SERCOS控制器发送相应的指令至伺服电机控制器,通过伺服电机来实现运动。
4、DDL连接的部件
运动控制器为ECORC2,DDL作为PROFIBUS网络的下一级网络,主要是用于气动阀组及比例阀的控制。
□ 输入模块和输出模块
现场信息通过此模块输入至控制器,并可将控制器的输出至相应的元器件或设备。
□ 比例阀
主要用于控制压缩空气的流量(整形空气1和2、马达空气),将计量功能集成在比例阀内,即可实现压缩空气流量的闭环控制。
控制系统使用协议
1、工业以太网
工业以太网是指其在技术上与商用以太网(IEEE802.3标准)兼容,但材质的选用、产品的强度和适用性方面能满足工业现场的需要,具有以下优点:
□ 应用广泛,支持多种编程语言;
□ 软硬件资源丰富,方便实现各种配置;
□ 易与Internet连接,实现办公自动化网络与工业控制网络的连接。
工业以太网可持续发展的空间巨大。目前,工业以太网以其特有的低成本、高实效、高扩展性及高智能性的优势,得到了快速发展,并在发展中不断完善。
为了防止因众多厂商研制和开发工业以太网技术,造成该技术标准众多、兼容性差的问题,国际社会已经开始制定工业以太网标准。
借助以太网和通信技术的突飞猛进,工业以太网技术已经开始向实时工业以太网和无线工业以太网的方向发展,并将在未来成为工业网络中的主流技术。
2、现场总线PROFIBUS协议
PROFIBUS是作为德国国家标准DIN 19245和欧洲标准PREN 50170的现场总线,以ISO/OSI模型为参考,由PROFIBUS-DP、PROFIBUS-FMS、PROFIBUS-PA组成。
□ DP型用于分散外设间的高速传输,适合于加工自动化领域的应用;
□ FMS为现场信息规范,适用于纺织、楼宇自动化、可编程控制器、低压开关等一般自动化 ;
□ PA型则是用于过程自动化的总线类型,它遵从IEC1158-2标准。
PROFIBUS支持主—从系统、纯主站系统、多主多从混合系统等几种传输方式。主站具有对总线的控制权,可主动发送信息。对多主站系统来说,主站之间采用“令牌”方式传递信息,得到令牌的站点可在一个事先规定的时间内拥有总线控制权。按PROFIBUS的通信规范,令牌在主站之间按地址编号顺序,沿上行方向进行传递。主站在得到控制权时,可以按主—从方式,向从站发送或索取信息,实现点对点通信。
PROFIBUS的传输速率为96~12kbps最大传输距离在12kbps时为1000m,15Mbps时为400m,可用中继器延长至10km。其传输介质可以是双绞线、光缆,最多可挂接 127个站点。
3、现场总线PROFISAFE协议
PROFIBUS因其拥PROFISAFE故障安全技术解决方案而成为唯一能够满足制造业(采用RS485和光纤传输技术)和过程工业自动化(采用“MBP-IS”,即曼彻斯特编码一总线供电和本质安全传输技术,原名IEC61158-2)故障安全通信要求的现场总线。
PROFISAFE使标准现场总线技术和故障安全技术合为一个系统,即故障安全通信和标准通信在同一根电缆上共存,节约了成本,也便于日后改建。
过程工业自动化要求采用冗余来提高设备的使用率。PROFISAFE则采用单信道通信结构的方法实现上述要求。单信道故障安全可编程控制器可以达到SIL3。这种通信结构原则上也可以执行标准自动化任务,如诊断、参数设置服务器等。
4、SERCOS协议
SERCOS(串行实时通讯协议Serial Real-time Communication Specification)是一种专门用于在工业机械电气设备的控制单元与数字伺服装置及可编程控制器之间实现串行实时通讯的国际标准。
目前,SERCOS是唯一的运动总线标准。对于具有高实时性和高性能要求的开放式控制系统,控制器和驱动器间的运动控制接口是关键的部件。而SERCOS接口包含了在多供应商环境下确保控制器兼容性和互操作性所必需的全部规定。
SERCOS数字运动控制接口提供了高度实时性,高精度同步,并且具有配置和访问多达400多个不同的驱动器参数的能力。
SERCOS的主要特点:采用光纤作为通信介质,强大的通信能力,极高的开放性,经济、可靠的分布式控制,支持高速高分辨率的数据通信,支持输入/输出控制,具有高度的灵活性。
机器人控制器及其组件
SIEMENS和机器人运动控制器ECORC2是两个主要的控制器。
1、站控制器(SIEMENS S7 416 F-2)
故障安全型系统,主要用于对人身、机器或环境必须保证安全的场合。当发生错误或故障时,故障安全型控制器进入安全状态或保持为安全模式,将标准的过程自动化和安全组合在了一个单系统内。中央控制器与安全有关的I/O以及标准的I/O之间的有关安全的通信和标准的通信均通过PROFIBUS DP和PROFISAFE行规实现。
2、机器人控制器ECORC2
专为往复机、机器人等运动和控制研发的控制器。
此控制器所控制的部件有机器人的各个轴、计量泵和高压发生器等。其组成部件如下:
□ 机架(CR092 Housing/Rack)
CR092设计用于支持所有的插入式模块。“背板总线”安装在机架背面的下半部分,并带有插入式模块多极性插槽;IEB1(扩展总线)总线安装在上半部分,相对于背板总线具有三个多极性接口。
机架上共有10个导轨和插槽,其中S0用于电源模块,S9用于总线终端模块,剩余插槽用于(S1~S8)。
□ 电源模块(PS 244 Power Supply Module)
该输入为直流24V,输出为直流5V(用于给插入式模块提供内部工作电压),并有±15V和12V可选。模块设有极性相反保护,过电压和过电流保护,同时设有复位信号,可以用于复位模块。
□ CPU(CU 313 CPU Module/Processor)
用于控制所有连接的硬件。由于ECORC2不支持热插拔功能,因此在从机架上将模块取下来时,一定要先将电源关闭。
□ 通信模块(SC 102 Communication Module)
通过扩展的总线连接CPU,这些增加的模块需要比较长的插槽,因此不能安装在CU 313 模块内,而应该分别安装在现场总线主站模块(上部),编码器接口模块(中部),现场总线从站模块(下部)的三个插槽内。现场总线可以是Interbus,PROFIBUS或者DeviceNet等。
□ 输入模块(DI 325 Digital Input Module)
用于检测外部电压信号,检测的范围18~30 V。必须设定硬件的地址,而且要特别注意硬件地址是否和软件地址相同,若两者不同,则逻辑上认为不存在。硬件地址的设置是通过在模块后部的旋转开关来实现的,可以设置的范围为0-F,通过J1跳线,地址可以到0-1F。
□ 输出模块(DO 321 Digital Output Module)
用于控制不同的外围输出,地址模块设有短路、过流和断线检测保护,输出模块的地址设置如上。
□ 示教仪
用于机器人程序的生成和管理。示教盘必须与ECOSCREEN结合起来使用,操作模式的选择,驱动的释放,选择和取消选择单个轴的运动,连接和取消连接控制电压等,都是通过它来实现的。但要注意:如果几个机器人配置一个示教盘,基于安全的考虑,要确保旁路开关必须首先按下,并在连接器移走和旁路连接器插上之前一直保持这个状态。
结语
随着汽车工业的发展,先进的汽车涂装技术和设备在我国得以快速应用。目前,在我国安装的涂装设备的水平已经有了很大进步。制造业的发展离不开先进的加工设备,对于这些先进设备的理解和掌握,不仅可以提高生产线的加工效率、改善产品的加工质量和员工的工作环境,同时对于我国的制造业发展,也是非常有利的。
声明:本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,也不构成任何其他建议。本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,不为其版权负责。如果您发现网站上所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容,以保证您的权益!联系电话:010-58612588 或 Email:editor@mmsonline.com.cn。

- 暂无反馈
