iGPS测量系统实现关键技术及应用
20世纪70年代,美国陆、海、空三军联合研制出GPS(GlobalPositioning System)全球定位系统(见图1),主要为陆、海、空三军提供实时、全天候和全球性的导航服务,并用于情报收集、核爆监测和应急通讯等一些军事目的。经过几十年的发展,GPS系统不仅仅只用于军事用途,现在已经逐渐深入到人们的日常生活当中,被视为全世界通用的定位系统。GPS系统的优势不仅在于它的先进技术,更在于它的系统理念。
图1 美国GPS全球定位系统
20世纪90年代,在GPS测量原理的启发下,美国Arcsecond公司率先开发出了一种具有高精度、高可靠性和高效率的室内GPS(indoorGPS,iGPS)系统(见图2),主要用于解决大尺寸室内空间测量与定位问题。iGPS对大尺寸的精密测量提供了一种全新的方法,解决了飞机外形、大型船身等大尺寸对象的精密测量问题。iGPS与GPS一样,利用三角测量原理建立三维坐标体系从而实现定位,不同的是iGPS采用红外激光代替了卫星(微波)信号。iGPS是利用室内的激光发射装置(基站)不停地向外发射单向的带有位置信息的红外激光,接收器接受到信号后,从中得到发射器与接受器间的2个角度值(类似于经纬仪的水平角和垂直角),在已知基站的位置和方位信息后,只要有2个以上的基站就可以通过角度交会的方法计算出接收器的三维坐标。
图2 大尺寸IGPS测量系统
iGPS测量系统具有以下优点:
(1)多用户测量。iGPS测量场是1个共享的资源场,位于测量场中的接收器独立工作,互不影响,像GPS系统一样,只需增加传感器和接收器的数量就可以增加用户。
(2)测量范围广。在iGPS测量网中,通过增加发射站可实现量程扩展,且不损失测量精度,其工作范围为2~300m。
(3)抗干扰性好。测量过程允许断光,且不影响测量精度。
(4)无需转站测量。可以通过增加发射器或对其进行部局重构,实现对系统内全部测量点的测量,从而降低或消除转站误差。
(5)可视化程度高。无论是在测量现场还是中央控制中心,操作人员都可以通过PDA或计算机屏幕实时看到被测点的三维坐标。
(6)一次标定多次使用。只要标定后的发射站位置不发生改变,该测量场即可无限次使用。
基于以上优点,近几年来国内外业界深入研究了iGPS测量系统,J.Schwendemann[1]等人通过研究指出,iGPS可用于巷道中掘进机及其他掘进设备的导航以及应力状态下飞机机身结构的变形测量;德国亚琛工业大学和尼康公司的RobertSchmitt[2]等人通过对不确定度的研究指出,iGPS系统除用于机器人的控制和校准以外,还可以广泛应用于航空、航天、造船、汽车等大尺寸、高精度定位与测量的装备制造领域。
本文介绍了iGPS测量系统组成,讨论了系统实现关键技术,列举了iGPS测量系统在飞机柔性装配中的应用。
iGPS测量系统组成
典型的iGPS测量系统主要由3大部分组成:信号发射、信号接收和信号处理(见图3)。信号发射部分为激光发射器,系统工作时,发射器发出2 道具有固定角度的扇面激光和全向光脉冲,该激光对人体和眼睛没有任何伤害;信号接收部分由传感器和接收器组成,传感器接收来自发射器发出的激光模拟信号,并传给放大器,接收器对放大信号进行处理并转化成数字化的角度信息;信号处理部分由中央计算机、客户端和数据处理软件组成,角度信息通过无线网络传输至中央计算机,由第三方数据处理软件(如MAYA、SpatialAnalyzer、Metrolog Ⅱ等)处理为准确的方位信息,并在整个工作区域和网络中共享,以便于多个用户从客户端读取被测点的位置信息,从而实现定位。沈飞公司与天津大学、634所联合研制的iGPS测量系统主要由发射基站、接收器(测量传感器)、前端处理机、控制网、任务计算机和主控计算机组成。主控计算机位于星形网络布局的中心,负责控制测量任务及参数配置、分配资源、构建及优化控制网并监控整个测量系统的状态。发射基站分布于整个测量空间,其数量和位置根据测量空间和测量任务进行规划,只要保证接收器(测量传感器)同时接收2个或2个以上发射基站的扫描激光信号,测量即可稳定进行。前端处理机负责实现接收器(测量传感器)接收到的光信号转换为时间信号,并通过Zigbee无线网络(无线传输距离可达40m)发送到任务计算机,由任务计算机完成空间坐标的解算并进行三维显示。控制网协助接收器完成精确解算的任务,并动态监控、更新发射基站参数,以实现系统的自动校正和补偿。经过系统应用测试验证,车间测量场系统精度能达到0.2mm。
iGPS测量系统实现关键技术
1 系统布局及测量网优化
iGPS测量系统中发射器和接收器的数量以及相对位置在很大程度上影响着系统测量精度,不同种类接收器的使用也会产生不同的测量精度。例如,3个发射器相对于2个发射器其测量精度可提高50%,4个发射器相对于3个发射器其测量精度可提高30%,5个发射器相对于4个发射器其测量精度可提高10%~15%[3]。此外,测量系统中全局控制网由多个区域测量网构成,究竟由哪些发射器和接收器组成区域测量网应根据实际情况进行分配。例如,在重点关注区域可布置较多的发射器,以进一步增强测量结果的稳定性。因此,只有合理布置系统资源,并进行测量网优化,才能实现被测对象的精准定位。
2 系统标定技术
iGPS测量系统中每个发射器都有自己的测量坐标系,所测得的角度值(方位角、俯仰角)也都是相对于各自的坐标系,为了利用不同坐标系下所测得的角度值,就需要在测量初始对发射器之间的相对位置关系和空间姿态进行标定,确定系统参数,使所有发射器测得的目标点的角度值在同一个坐标系下。iGPS系统标定实际上就是通过测量空间目标点,然后对其观测值进行平差解算,求得各发射器测量坐标系之间的相对位置和姿态。在利用系统标定后的iGPS对空间未知目标点进行测量时,根据测得的观测值及发射器测量坐标系之间的相对位置和姿态关系,便可解算出未知点的三维坐标。因此,系统标定技术是iGPS测量系统进行空间点坐标测量的前提和关键[4]。
3 数据处理与分析
使用iGPS系统进行测量时,接收器接收来自不同发射器发出的激光模拟信号,为了快速获得目标点的坐标,要求接收器对各通路数据进行实时处理,提高数据处理速度,为实现多任务、多目标点的同时测量打下基础。此外,采用iGPS进行位姿调整时,需要根据目标点的测量值与理论值差异来确定调整量。因此,为了实时反馈调整信息,必须实现测量数据的快速处理和分析。
4 误差补偿技术
iGPS测量系统误差主要源于仪器误差、附件误差、环境误差和方法误差等[4]。仪器误差包括发射器和接收器误差,发射器产生误差的因素主要有:轴系偏摆、光脉冲延时同步、电机转速偏移以及光源信号、光平面的倾角及相对位置等。接收器产生误差的因素主要影响体现在计时测量及其匹配判别、接收器光路设计等方面。针对每一个发射器,360°范围内不同角度的测量误差是不同的,可以根据实际测量结果结合插值等方法进行角度修正。系统的定向分为内参数标定和现场定向2部分,影响内参数标定质量的因素主要有激光器自带误差以及转轴标定精度;影响现场定向质量的因素包括测角精度(系统硬件精度)、发射站布局、标定点的选取及现场空间的限制、标定算法以及控制点精度等。iGPS作为角度交汇测量系统,发射站的布局对测量精度会产生较大的影响,主要影响因素有基线长度、交汇角、约束方向以及发射站的个数等。对于全局测量误差,可以在全局布置几个目标点,并且用高精度测量设备对其定位,当发射器工作一段时间后,重复测量这几个目标点的坐标,根据测得的误差进行全局误差补偿。只有采用正确的误差补偿方法,才能提高iGPS测量系统的精度、可靠性和稳定性。
iGPS系统在飞机柔性装配中的应用
1 柔性装配工装定位
飞机柔性装配工装由骨架、定位件、夹紧件及辅助设备等组成,工装定位件安装的准确度对飞机装配精度起着重要的作用。柔性工装尺寸大、结构复杂、定位件多,采用传统测量设备对其定检所需的时间较长,因此可以使用iGPS测量系统进行工装的定位安装,从而大大缩短工装准备时间,提高装配效率。
2 自动牵引运输车导航
在飞机柔性装配前,不同装配车间之间或者从装配车间到试飞场之间的部件运输,都需要大量牵引运输车进行频繁的穿梭作业。对于固定导轨系统来说,很难实现运输路径的改变。而iGPS测量系统可以实现对自动牵引运输车的精确导航,并且根据需要进行交通控制和传输路径规划,控制停泊位置和电池充电站[5]。
3 部件对接
尼康公司报道称,巴西AeronauticsInstitute of Technology(ITA)和巴西航空工业公司(Embraer)在小型客机自动化装配中(见图4)采用了iGPS系统。其装配场地面积为300m2,高10m,测量系统由iGPS、摄影测量和激光雷达组成,协助2台重型工业机器人进行机身装配。

图4 小型客机自动化装配
美国波音公司从1998年开始研究iGPS测量技术,并已应用于从747、F/A18到777等飞机的总装对接中,解决了对大尺寸构件的测量问题。在最新的787客机总装(见图5)中,iGPS技术应用更加成熟。装配过程中,测量系统会定位飞机部件,这些数据信息被输入到系统的应用软件中,从而解算出飞机各部件(前后机身、左右机翼等)需要移动的距离,以确保飞机相邻部件的准确对接装配。这一精确的定位过程保证了飞机的平滑装配,使得787机翼机身对接装配仅用了几个小时,而不是通常所需的几天[6]。

图5 波音787部件对接
4 工业机器人自动引导
使用iGPS系统对工业钻铆机器人进行实时引导,以提高机翼指定位置处钻孔及铆接精度;可使机翼钻孔和铆接工位的定位准确程度提高10倍。在动态制造过程中当部件由机械人夹持进行焊接时,也可由iGPS对机器人进行实时跟踪定位提高焊接精度;为无法使用精确位置反馈(编码器/解析器)获得全局坐标系的爬行机器人提供位置信息。
5 全机水平测量
iGPS测量系统还可以用于飞机的全机水平测量,实现产品的质量控制。操作人员用来检查飞机成品整体的外形结构、机翼的水平度、重要部件尺寸大小和原始图纸设计的相符程度,以及飞机试飞前后关键点的变形情况等,从而达到对飞机成品的质量检测[5]。应用iGPS系统完成全机水平测量无需使用专用工装和场地,不必调整飞机处于水平状态,在任何工位和姿态下均可实现,系统标定后,1~2名操作者30mm内即可完成全机水平测量工作,传统方法完成全机水平测量平均需要5~8h,测量精度由mm级提高到μm级。
6 其他应用
F35全机外表面隐身喷涂(见图6),应用8个固定的iGPS发射站安装装置,每个固定装置内有2台红外发射器,在工位四周分布有22个可移动iGPS安装装置,通过红外发射站照射整个工位对激光投影设备及机身上的光学传感器进行角度交汇定位,每个光传感器具有360°的视场,实现对涂层的监测控制。
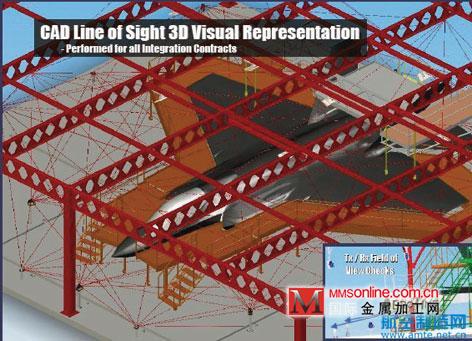
图6 F35全机喷漆
此外,iGPS系统还可以用于机器人刀具中心点位置的实时监测。
结束语
iGPS系统具有测量范围广、多任务测量、无需转站等优点,被广泛应用于工业领域。本文介绍了iGPS测量系统的组成,分析了系统实现的4 项关键技术:系统布局及测量网优化、系统标定技术、数据处理与分析及误差补偿技术,最后列举了iGPS系统在飞机柔性装配过程中的应用,主要用于柔性装配工装定位、自动牵引运输车导航和部件对接等。
参 考 文 献
[1] Schwendemann J,Muller T,Krautschneider R.Indoor navigation of machines
and measuring devices with iGPS.2010International Conference on Indoor Positioningand Indoor Navigation (IPIN),2010.
[2] Schmitt R,Nisch S.Performanceevaluation of iGPS for industrial applicatios. 2010International Conference on Indoor Positioningand Indoor Navigation(IPIN),2010.
[3] 吴晓峰,张国雄.室内GPS测量系统及其在飞机装配中的应用.航空精密制造技术,2006,42(5):1-5.
[4] 陈登海.基于室内GPS的飞机数字化水平测量技术研究[D].南京:南京航空航天大学,2010.
[5] 邹方.未来工厂的数字化测量世界.航空制造技术,2008(19):26-29.
[6] 于勇,陶剑,范玉青.波音787飞机装配技术及其装配过程.航空制造术,2009(14):44-47.
声明:本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,也不构成任何其他建议。本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,不为其版权负责。如果您发现网站上所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容,以保证您的权益!联系电话:010-58612588 或 Email:editor@mmsonline.com.cn。

- 暂无反馈