基于单片机及传感器的机器人设计与实现
1 前 言
机器人技术是融合了机械、电子、传感器、计算机、人工智能等许多学科的知识,涉及到当今许多前沿领域的技术。一些发达国家已把机器人制作比赛作为创新教育的战略性手段。如日本每年都要举行诸如“NHK杯大学生机器人大赛”、“全日本机器人相扑大会”、“机器人足球赛”等各种类型的机器人制作比赛,参加者多为学生,旨在通过大赛全面培养学生的动手能力、创造能力、合作能力和进取精神,同时也普及智能机器人的知识.[1]
开展机器人的制作活动,是培养大学生的创新精神和实践能力的最佳实践活动之一,特别是机电专业学生开展综合知识训练的最佳平台。本文针对具有引导线环境下的路径跟踪这一热点问题,基于单片机控制及传感器原理,通过硬件电路制作和软件编程,制作了一个机器人,实现了机器人的路径跟踪和自动纠偏的功能,并能探测金属,实时显示距离。
2 机器人要完成的功能
选取一块光滑地板或木板,上面铺设白纸,白纸上画任意黑色线条(线条不要交叉),作为机器人行走的轨迹,引导机器人自主行走。纸下沿黑线轨迹随机埋藏几片薄铁片,铁片厚度为0.5~1.0mm。机器人沿轨迹行走一周,探测出埋藏在纸下铁片,发出声光报警,并显示铁片距离起点的位置。
3 硬件设计方案
机器人总体构成
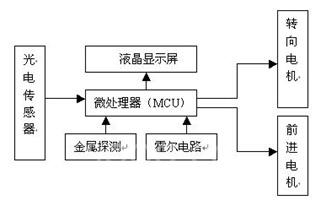
图1机器人总体构成
如图1所示,以微处理器为核心,接受传感器传来外部信息,进行处理,控制机器人的运行。
系统电源供电部分
由于机器人电机,传感器及系统CPU等部分均采用+5V供电,考虑电动车功率和车载质量及摩擦阻力问题,电源我们采用电动车自带干电池组,功耗小、体积小和质量轻,安装较为方便。
电机驱动及PWM调速部分
机器人需控制在一个合适的速度行驶,速度太快,因单片机对各传感器传来的信号有一个响应、处理时间,小车极易偏离轨道。小车的速度是由后轮直流电机转速控制,改变直流电机转速通常采用调压、调磁等方式来实现。其中,调压方式原理简单,易与实现。
采用由晶体管组成的H型PWM调制电路。通过图2所示PWM调制电路,用单片机控制晶体管使之工作在占空比可调状态,实现调速。

图2 电机驱动电路
令单片机P1.7口为低电平,P1.6口为高电平,此时Q1、Q4导通,Q2、Q3截止,电动机正常工作。改变P1.6口高电平周期,即改变PWM调制脉冲占空比,可以实现精确调速。脉冲频率对电机转速有影响,脉冲频率高连续性好,但带负载能力差;脉冲频率低则反之[2]。经实验发现,脉冲频率在30Hz以上,电机转动平稳,但小车行驶时,由于摩擦力使电机转速降低很快,甚至停转;脉冲频率在10Hz以下,电机转动有跳跃现象,实验证明脉冲频率在25~35Hz效果最佳。我们选取脉冲频率为30Hz。
引导线检测模块
根据白纸和黑线反射系数不同,通过以光电传感器为核心的光电检测电路将路面两种颜色进行区分,转化为不同电平信号,将此电平信号送单片机,由单片机控制转向电机作相应的转向,保证小车沿引导线行驶。考虑到小车与路面的相对位置,采用反射式光电检测电路。
红外光电传感器TCRT1000,它是一种光电子扫描,光电二极管发射,三极管接收并输出的装置 .它的特点是尺寸小、使用方便、信号高输出、工作状态受温度影响小。它的外围电路简单,(如图3所示)。二极管的C端和三极管的E端接地,二极管的A端通过一电阻和电源相接,组成偏置电流电路;三极管的C端也通过一电阻和电源相接,组成输出电路。当检测器检测到白色时,其输出低电平;当检测到黑色时,则输出高电平。
为提高检测精度,采用了多传感器信息融合技术。设计中,在车头均匀布置三个光电传感器,其中,中间一个(Q1)安装在小车正中央。Q1的输出经一级比较器和非门,接单片

图3 光电检测转换电路
机的P1.3脚.Q1左右两端分别布置一个传感器,经与图3相同的电路后也连接到单片机P1口。若两侧某一传感器检测到黑线,表明小车正脱离轨道,将3个检测点的结果融合后作为单片机的输入,机器人按照单片机P1口信息进行判断调整,实现路径跟踪和自动纠偏[3]。

金属探测部分
图4 金属探测电路
如图4所示,金属探测器使用一接近开关,探测有效距离约为4mm,将它固定在机器人上,当探测到金属片时,探测器输出端输出低电平,经反向器后接一发光二极管和一蜂鸣器,发出声光指示信号。同时输出反向后接单片机,对探测到的金属片个数进行计数。
霍尔元件测距设计
霍尔集成片内部由三片霍尔金属板组成,当磁铁正对金属板时,根据霍尔效应,金属板发生横向导通[4],因此可以在车轮上安装磁片,而将霍尔集成片安装在固定轴上,通过对脉冲计数进行距离测量。小车后轮每转一圈,霍尔元件产生的脉冲送入单片机的T0口进行计数,单片机完成脉冲数到距离的转换。在后轮安装一个磁极,测量误差是一个车轮的周长,可在软件中给予补偿。
LCD显示
液晶显示器以其微功耗、体积小、显示内容丰富、超薄轻巧的诸多优点,在袖珍式仪表和低功耗应用系统中得到越来越广泛的应用。 这里采用2行16个字的DM-162液晶模块,通过与单片机连接,编程,完成显示功能。
4 系统软件流程
系统软件流程如图5所示。

图5 系统软件流程图
5 结论
本文基于单片机及传感器原理,以单片机为控制器的核心,小型直流电机作为驱动元件,配置不同类型的传感器,通过软件编程,制作出了一个价格低廉、模块化结构的小型机器人。大量的行走实验证明,该机器人能够顺利路径跟踪和自动纠偏自主行走,并完成探测、显示等功能。
本文作者创新点:本文针对具有引导线环境下的路径跟踪这一热点问题,采用多传感器信息融合技术,通过单片机控制,实现了机器人的路径跟踪和自动纠偏的功能,方法简单,易于实现,造价低廉,效果较好。
参考文献
[1]韩建海,赵书尚,张国跃等。基于 PIC 单片机的六足机器人制作。机器人技术与应用,2003,06
[2] 姜长涨,于万元,王冬蕾。基于AVR单片机的直流电动机的PWM调速系统设计。仪器仪表用户,2006,02
[3] 薛艳茹,郑冰, 郝兴贞,等。基于模糊控制信息融合方法的机器人导航系统。微计算机信息,2005年第11-2期
[4] 张寿安。霍尔效应在位置控制中的应用。长沙铁道学院学报(社会科学版),2005,02
声明:本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,也不构成任何其他建议。本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,不为其版权负责。如果您发现网站上所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容,以保证您的权益!联系电话:010-58612588 或 Email:editor@mmsonline.com.cn。

- 暂无反馈



