设计仿真 | Simufact Welding焊接工艺仿真网格划分技巧
1 网格划分基本概述
对于每个有限元(FE)仿真而言,必须将连续工件空间离散化为有限数量的单元。这些单元代表了真实工件的质量、刚度等方面的物理特性。空间离散化也称为网格划分。通常,网格划分由网格生成器执行。网格对整个求解分析起着至关重要的左右,主要体现在以下几个方面:
01 网格数量影响到求解的精度和效率
常规来说,在电脑配置足够的情况下,网格数量越多,模拟得到的结果越为精确,但是当网格数量达到一定数量后,结果精度不再随着网格数量的增加而增加,并且求解时间也越久,通常情况下,我们需要平衡整个求解过程的求解效率和求解精度,这就需要我们控制网格数量。

02 网格类型影响计算结果
不同的求解类型需要的网格类型是不一样的,在焊接模拟分析中,我们常用的网格单元是六面体单元,但有时候也会因为模型的复杂程度,选择不同的采用四面体单元进行模拟分析。
03 网格连续性
在实际焊接过程中,各零部件间是相互接触的,可能随着焊接的进行而分离,在大部分模拟软件中,会要求保证各零件间的网格连续性,即节点耦合,但这不仅仅脱离了实际焊接过程中的情况,也会极大的增加焊接网格划分的工作量,在Simufact Welding软件中,其基于Marc的专业求解器,基于其优异的非线性求解分析功能和强大的网格自适应接触功能,能够使得各零部件间的网格不连续,即各零件间单独进行网格划分,无需进行网格连续的操作划分。
Simufact Welding的网格不连续功能
2 Simufact Welding网格类型
在Simufact Welding中,我们常用的实体网格类型共有4种,分别为:六面体 (7)、实心壳体(185)、四面体(157)、四面体(134)。
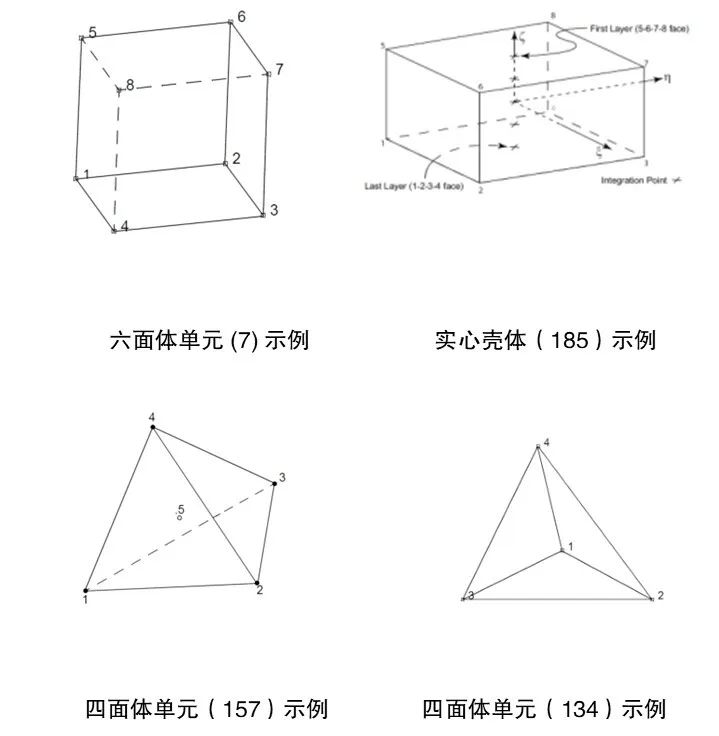
一般而言,六面体单元精度是最好的,同时单元数量也较少。但不是每一个几何体都适合用六面体单元来进行网格划分。如果因为几何形状的太复杂而不能创建六面体网格,则应该使用四面体(157)单元。四面体(157)单元在其中心多一个的节点,并且其他节点都具有附加的压力自由度。因此四面体(157)单元比四面体(134)单元更精确。
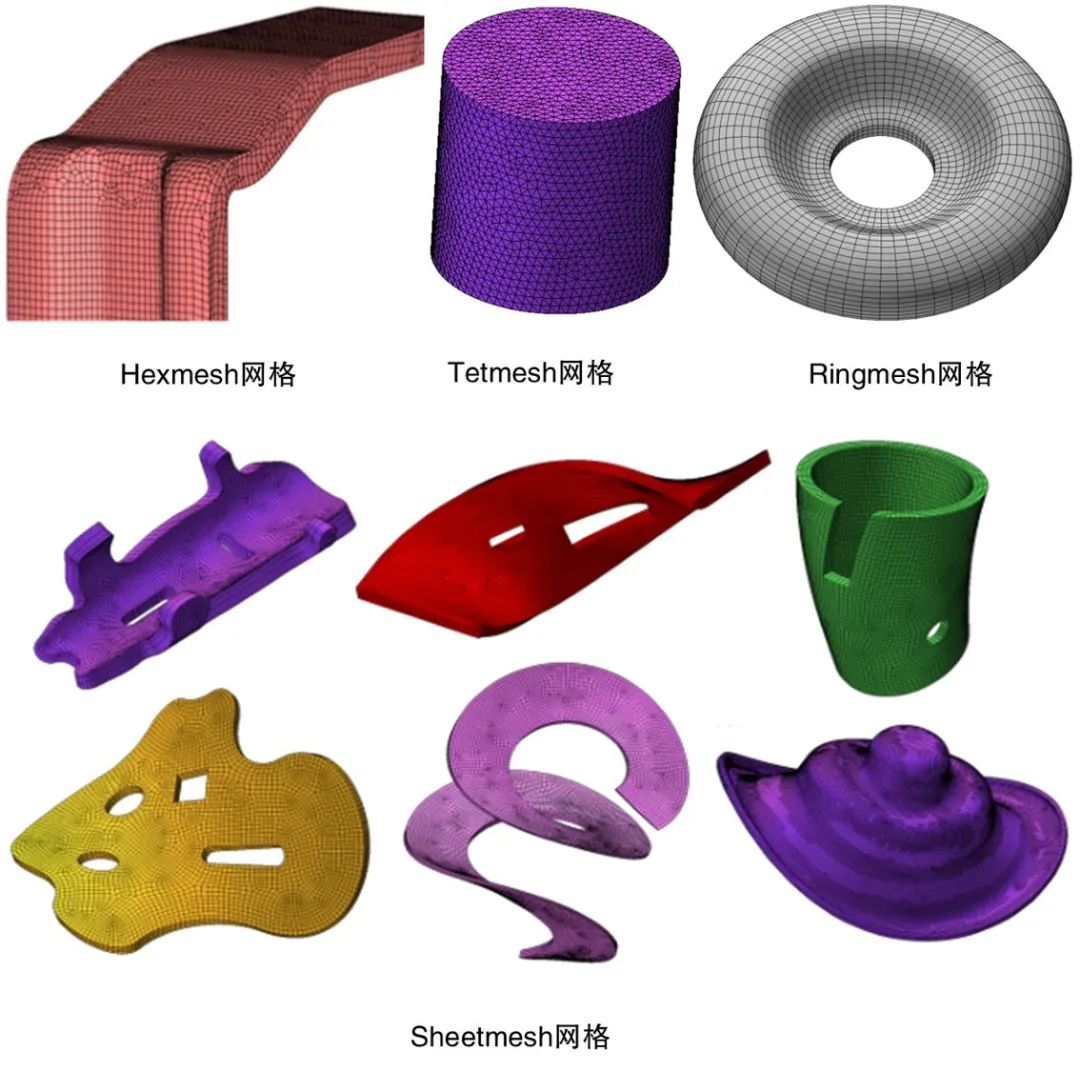
Simufact Welding软件还具有专业的网格划分工具,包括支持六面体Hexmesh网格、钣金零件的Sheetmesh网格、四面体单元的Tetmesh网格、单独针对环形零件的Ringmesh网格,用户也可以根据自身的实际情况,选择其他的网格划分工具,软件支持专业的网格格式,例如*BDF、*ARC等。
3 Simufact Welding网格细化功能
前文提到,为了保证零件的计算精度和计算效率,我们通常需要对网格数量进行控制,而常规的网格控制方法,即为局部进行网格细化和粗化。在Simufact Welding软件的焊接模拟过程中,我们通常只需要关注焊缝区域和热影响区域的网格质量,我们需要将这两个区域的网格进行细化,而母材区域的网格,我们则不需要进行细化,进而控制住整体零件的网格数量。

全局: 一个单元尺寸用于整个部件(最差案例)
局部:在焊缝附近局部细化
(较好, 但是对于长焊缝的大型模型,速度较慢)
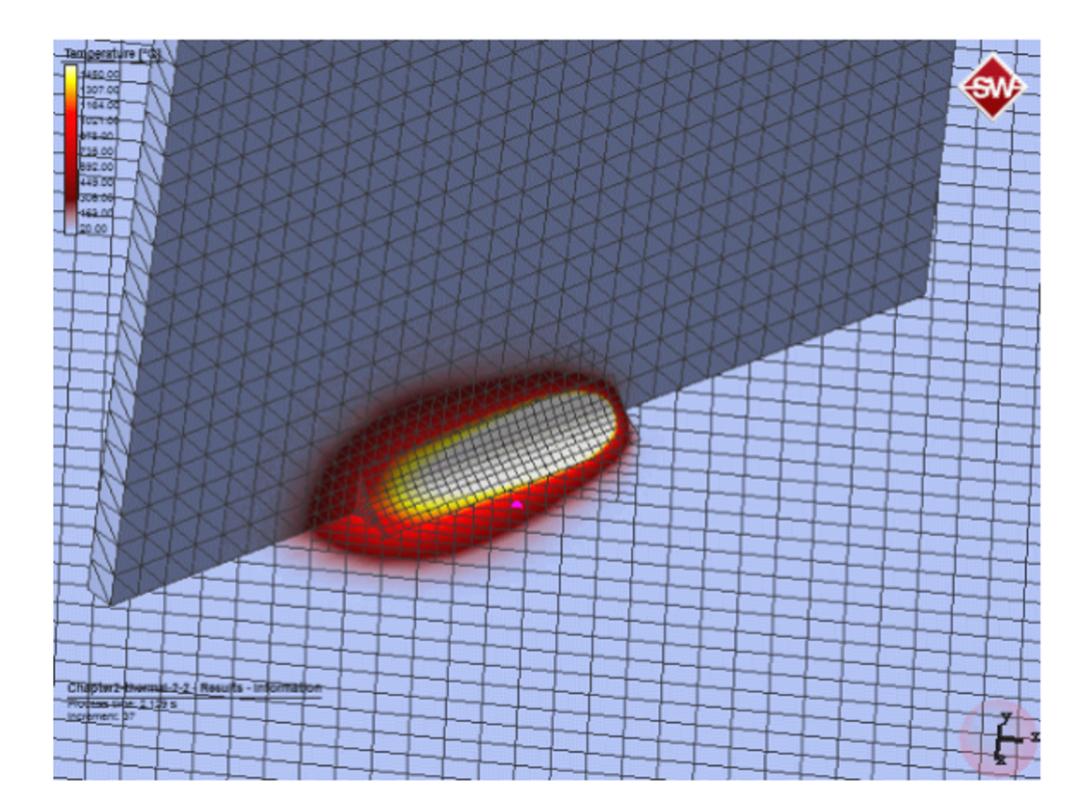
自适应: 在使用Simufact Welding 时 模拟中自动细化
(较好,但是不要超过2个细化级别)
在常规零件模拟过程中,若网格数量较少,我们可以选择整体零件采用一种尺寸;但针对大部分焊接零部件,因为其模型较大,我们推荐在网格划分时,对焊缝区域和热影响区域进行网格细化,保证其整体网格数量,在时间和计算机允许的情况下,可以选择Simufact Welding软件的自动细化/粗化功能,能够极大的减少我们进行网格细化的工作;若网格数量特别巨大,例如>50万时,推荐使用Simufact Welding软件的自动细化/粗化功能。
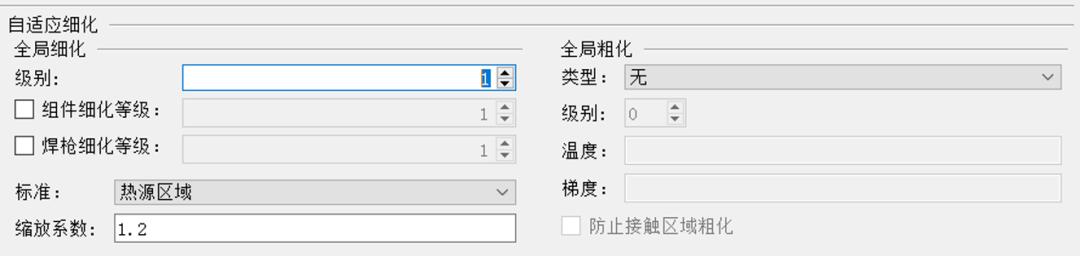
Simufact Welding软件还具有细化框功能,能够根据用户的手动设置细化框大小,自动细化局部区域。
Simufact Welding细化框
4 Simufact Welding网格划分原则
01 网格大小控制原则
在Simufact Welding焊接模拟仿真过程中,针对其网格划分,因为其模拟精度和质量主要依据于焊缝区域和热影响区域的网格,所以我们在进行相关工作时,主要基于下列两个原则:
1、组件厚度;厚度方面的问题,如果宽高比大于 1:8 ,即最小单元边到一个单元的最大单元边。如果超过这个宽高比,这个单元的刚度会很差,并且会产生不良的结果,并且可能会增加计算时间(模拟可能会变得不稳定)。常规在Simufact Welding软件中,我们推荐采用1:3以下的比例,适当的可以放宽到1:5。
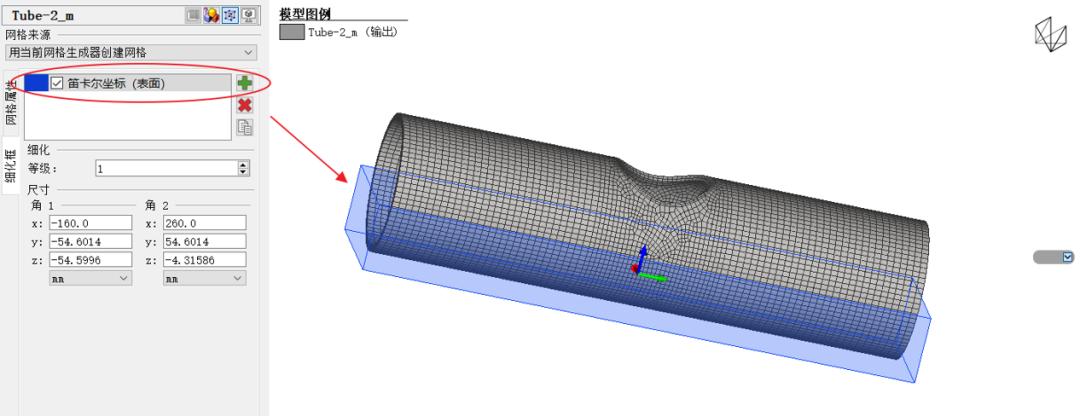
2、焊缝/热源尺寸;为了捕获合理数量的积分点并具有恒定的瞬态模拟热通量,我们通常需要将单元尺寸调整为热源尺寸,遵循以下原则:宽度(b): 2 - 3 单元 (每一边) 、长度(af+ar):3 - 4 单元、深度(d): 2 - 3 单元;
热源示意图
例如:
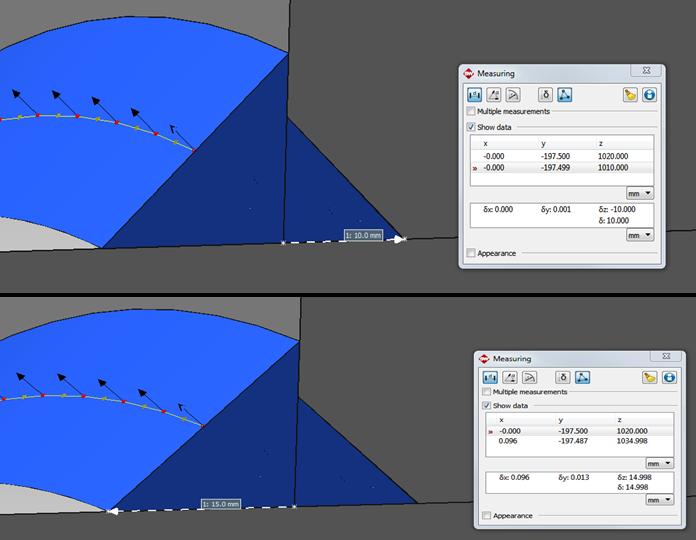
我们通过检查焊缝,发现其右侧焊脚高度为10mm、左侧焊接高度为15mm,此时我们可以选择:
1、焊脚为10mm的焊缝,我们可以选择网格尺寸为5mm或者3.3mm(即2~3层网格);
2、焊脚为15mm的焊缝,我们可以选择网格尺寸为7.5mm或者5mm;
上述的方式,我们可以根据相应的原则来进行网格划分,但很多时候,因为焊缝较多且为了避免进行重复性的复杂网格划分,我们可以选择4mm作为折中的快速焊缝网格划分。
02 网格质量控制原则
较大的畸变网格或者不合理的网格大小比例,都会影响到Simufact Welding软件的模拟质量,因此在进行网格过渡、细化、接触区域网格划分时,需要进行注意,主要涉及到以下几点:
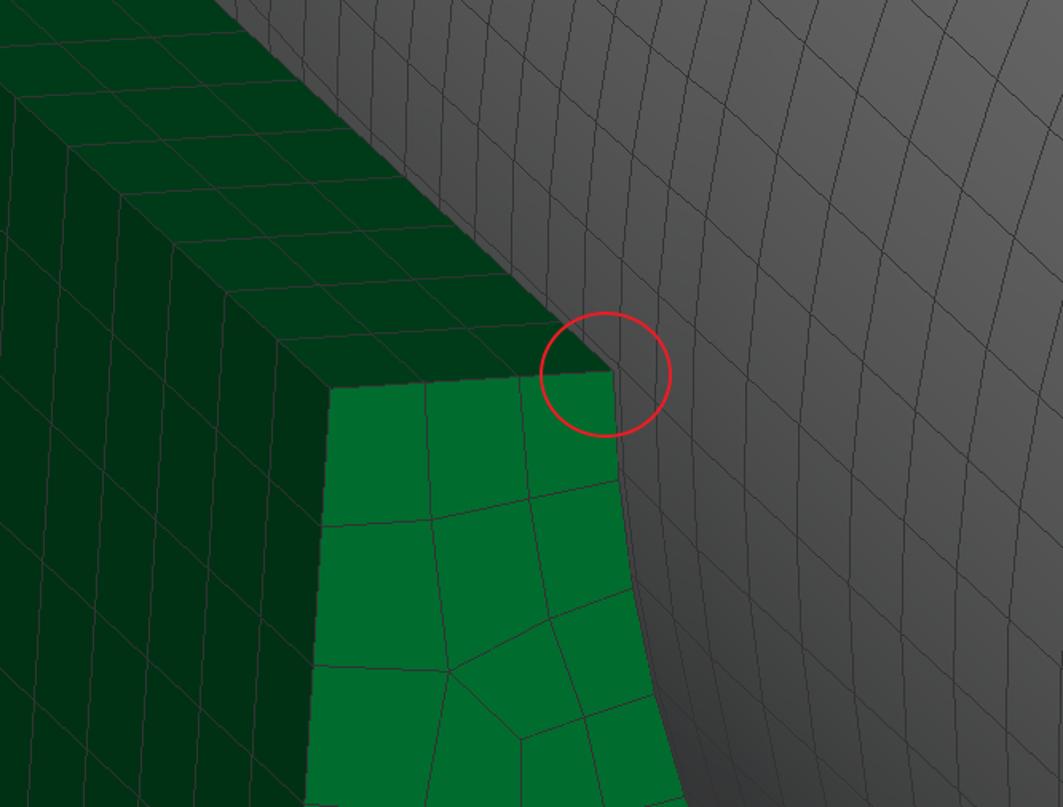
1、避免较大扭曲单元,这种类型的单元刚度系数较差,将会导致模拟不稳定,很容易产生网格穿透的畸变网格(单元的插值点将在单元外)。
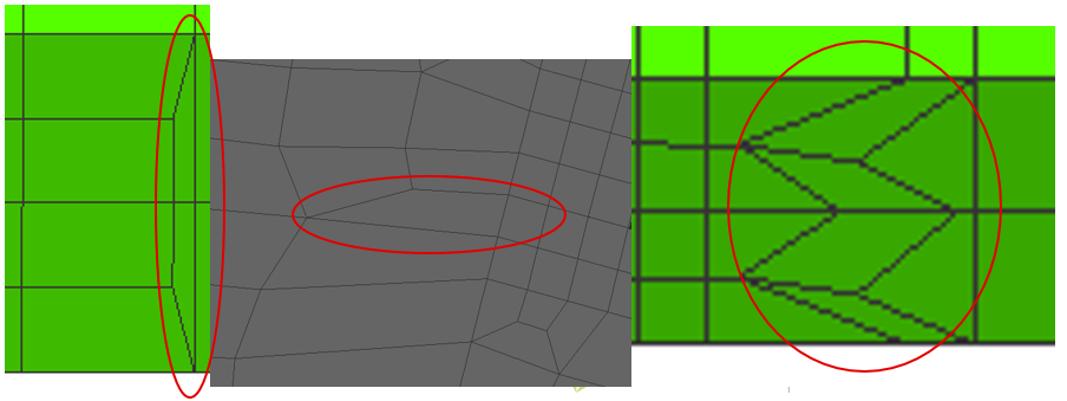
尖锐网格
2、避免直接从焊缝处进行粗化过渡。如直接进行过渡,在模拟时该区域的温度梯度将会变得很差
焊缝处直接进行粗化过渡
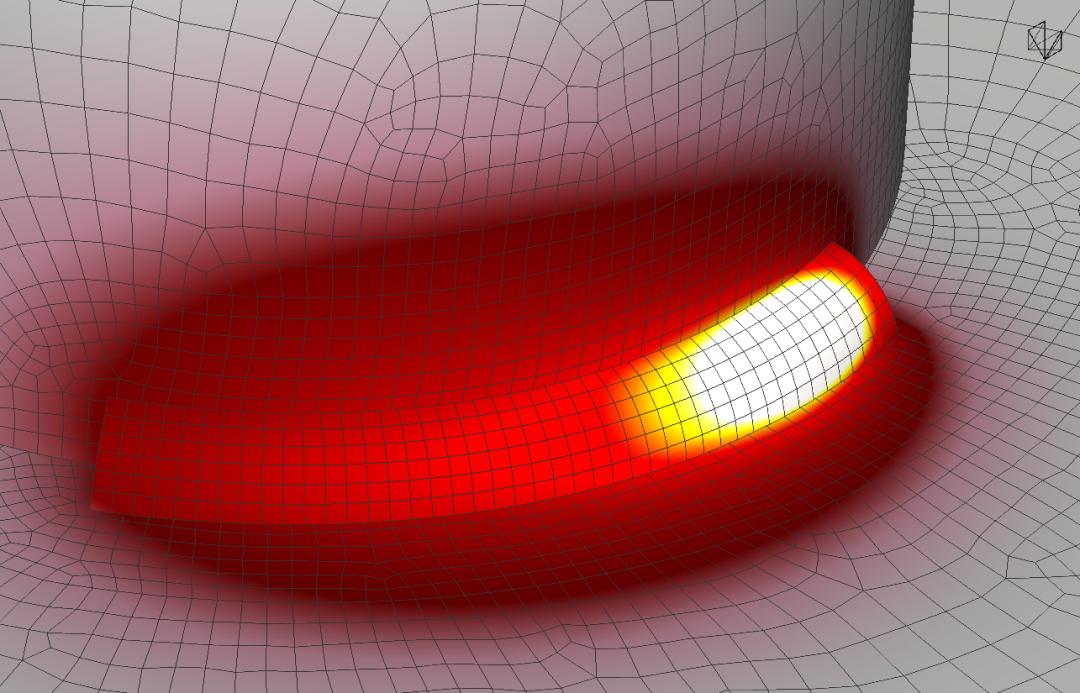
合理平滑网格模拟结果
3、控制相邻网格大小比例≤2:1。若两个部件间的单元比率较差,模拟将会变得非常不稳定,可能会崩溃。
相邻网格比例过大
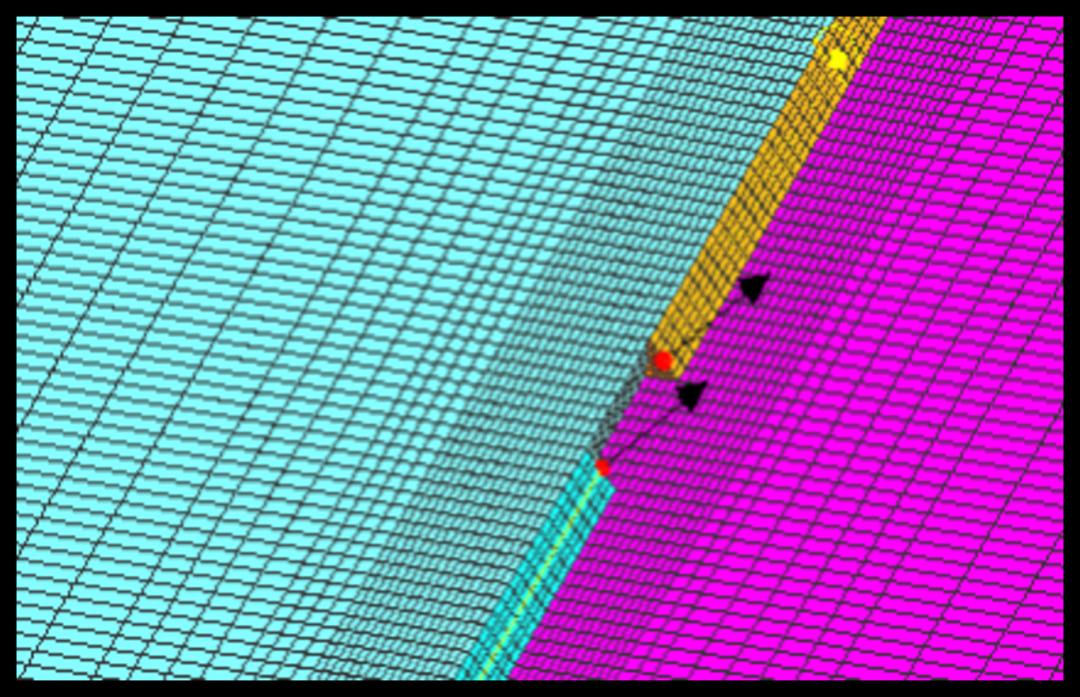
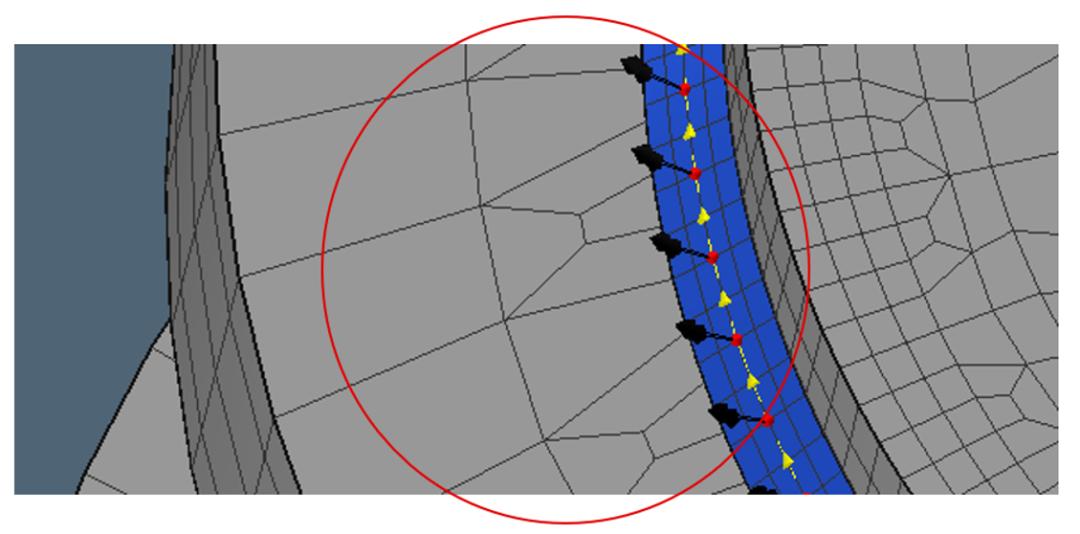
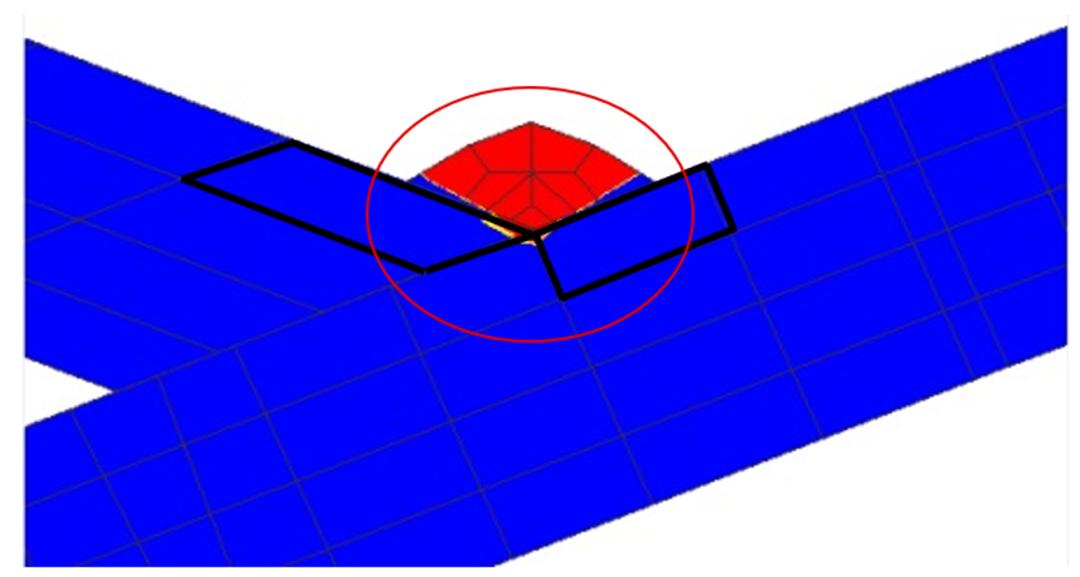
4、接触区域网格,避免双重交叉。因为Simufact Welding能够进行网格不连续的模拟分析,但在接触区域,若网格发生双重交叉穿透,也会影响模拟精度和收敛性,左侧为良好的网格接触情况,右侧为差的网格接触状态。
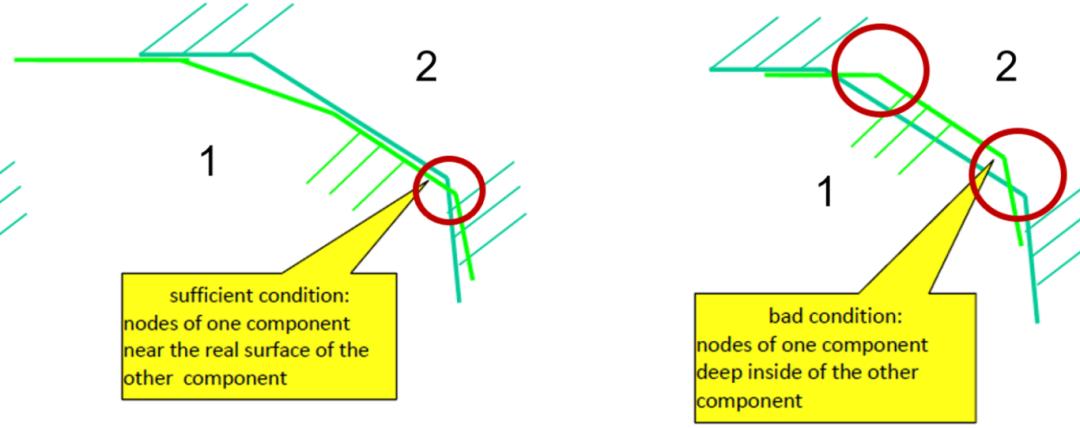
接触区域网格示例
5、避免模型间的干涉穿透。在实际的CAD模型中,容易出现模型间的穿透和交叉,再此情况下,我们需要进对CAD模型进行优化调整;
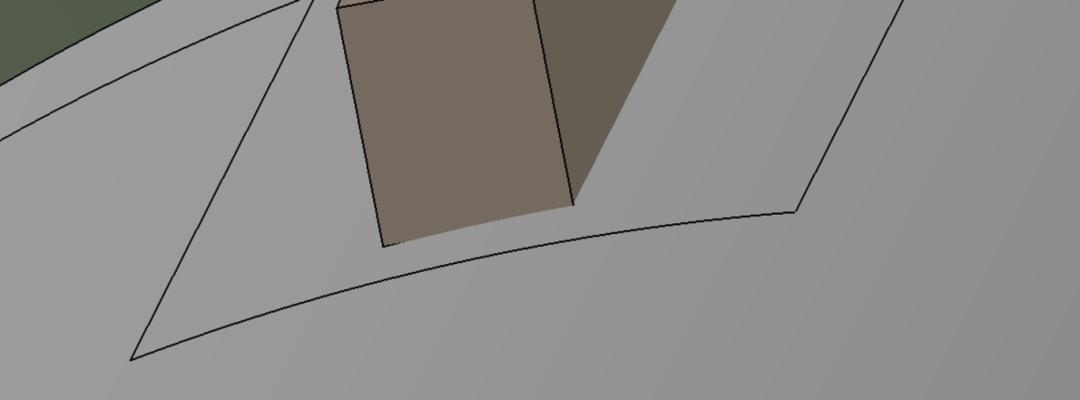
干涉模型











(海克斯康工业软件)
声明:本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,也不构成任何其他建议。本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,不为其版权负责。如果您发现网站上所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容,以保证您的权益!联系电话:010-58612588 或 Email:editor@mmsonline.com.cn。

- 暂无反馈

