德国雄克:RS2013工业机器人展展前预览(展位号:N1-B098)
参展展品介绍
轻型模块式机器人手臂
Lightweight Arm LWA 4D

雄克LWA系统机器人手臂,重复定位精度可达到±0.15 毫米,有效载重比高于2:1,在全动力时可负载多达10KG的物体。7 自由度设计可实现任何方位的运动及定向,能胜任许多人眼所不能达到的区域。通过与三指灵巧手的无缝连接,可替代人手进行非常复杂的工作。LWA 的整个电子控制系统集成在自身的关节驱动中,位置、速度和转矩是柔性可控的。这款轻型手臂已成功地应用于多种不同场合:重度残疾人的辅助系统,实验室应用,拆弹平台应用,以及用于处理家务的服务型机器人等。由于它的高坚韧度和高精密度,也完全适用于完成测量和控制的任务。
同时,这种手臂可以通过嵌入式芯片控制。仅仅需要简单的设计和编程,就可以控制它完成复杂的任务。为了将它的能量损耗最小化同时增加安全性,这种手臂只需24V直流电源就可以启动。是许多科研及高教应用的首选,广泛应用于全球各大科研机构及高等院校。
6轴球形模块化机器人
Powerball Lightweight Arm LWA 4P

此款6轴球形模块化机器人是在国内展览会上的首次展示。此款轻型机器人手臂LWA 4P从第一个关节至最末端的抓取机构都采用紧凑型设计,柔性度很高,即使在很小的空间范围内也可自由伸缩,其核心部件是由三个高度集成的球形模块Powerball ERB组成,每个模块有两个旋转轴,整个电子控制系统集成在关节驱动中,位置、速度和扭矩可独立调节控制。此机器人自重相当轻,但负载很大,重量/负载比为2:1,是目前世界上最高效的轻型机器人。此6轴球形模块化机器人使用的电压为直流24V,平均功率在80W以内。重复定位精度为0.06 mm,可有效满足一些高稳定,高要求的检测和测试应用的需求。该手臂可通过触摸显示屏或远程控制手柄进行控制,操作非常简单。智能化的设计,高安全性,防碰撞系统,为人类的直接使用提供了先决条件和安全保障。
SDH 电控伺服三指灵巧手
SDH servo-electric 3-Finger Gripping Hand
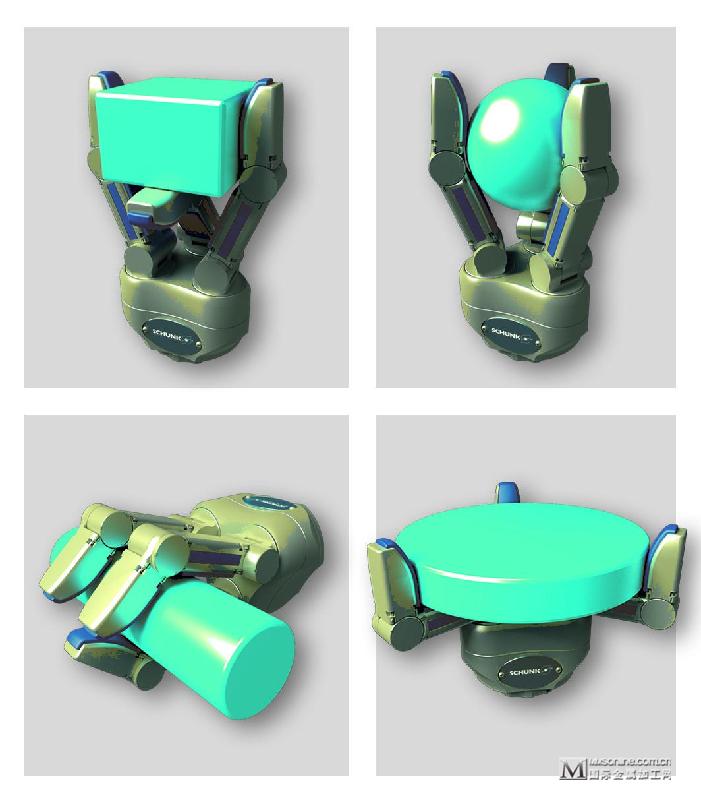

SDH 三指灵巧手可以配合物体形状及所需力精确抓取,是一种应用范围特别广泛的抓取机构,适用于许多家庭用品的形状和重量,如水瓶、玻璃杯、盘子等,亦可用于工业应用领域。该机械手的两个手指能够改变自身方向,使之可适应各类抓取环境。手指上的表面触觉传感器系统可进行压力和表面识别,在抓取过程中能够检测到物体是否已经被精确抓取或者按需要继续进行调整。SDH三指机械手具有较大的抓取力,和人手力量相仿,能够被灵敏监测并通过集成的传感器控制。SDH电控伺服三指灵巧手,能够根据被抓取物体的形状、尺寸和方向展示出高度灵活性。
公司信息:
雄克精密机械贸易(上海)有限公司
上海市闵行区春东路479号16幢C2厂房1楼东区
电话: +86-21-51760266 传真: +86-21-51760267
info@cn.schunk.com www.cn.schunk.com
展位号:N1-B098
(德国雄克)
声明:本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,也不构成任何其他建议。本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,不为其版权负责。如果您发现网站上所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容,以保证您的权益!联系电话:010-58612588 或 Email:editor@mmsonline.com.cn。

- 暂无反馈

