程序运动控制技术(Sequence Motion Control Technology)
摘要
由于半导体与光电产业对生产技术高速、多轴与高精确度的需求,生产机台或检测机台中使用的运动控制硬件控制卡越来越向精确时程控制的目标发展,本文将针对新应用趋势的『程序运动』技术及『绝对同步』运动控制技术做概念性的介绍,并且与读者分享在产业上的应用案例。
一、前言
在大多数制造业的生产流程中,运动控制占有非常重要的地位,很多的机器、设备,包含半导体或是光电产业设备,或者是传统机械产业的车床、铣床、CNC整合加工机具等,都包含运动控制的模块。
在PC采取开放式架构以及价格优势下,一些专业领域的专家,开发了很多能在PC-based上应用的控制卡,希望能为PC-based用户提供解决性方案。而近年来,由于影像视觉的辨识技术逐渐成熟,运动视觉解决方案对搭配运动控制技术的需求也越来越明显。这些技术的进步促使整个工业产业的应用层面更为丰富。更多的设备开发商,可以选择使用开放架构的PC和操作系统作为控制用的平台,也因此更多的核心开发技术可以掌握在开发者手中,再加上价格优于其它解决方案,因此具备了很强的竞争优势。
在运动控制方面,大致可以归纳出几项运动所需要的控制轨迹:
(1) 点对点运动(Point-to-Point):单轴的运用,通过运动控制卡的指令集,控制单轴由A点运动到B点,所以又称为点对点运动。
(2) 补间运动(Interpolation):补间运动通常可以分为线性补间及圆弧补间运动。线性通常可以由两轴以上构成,而圆弧补间运动则由两轴构成,形成一个多维或二维的运动轨迹。通常补间运动可以用于连续轨迹的运动控制,例如雕刻或是鞋模等等。补间运动的解析决定了轨迹运动的控制精度。
(3) 螺线型运动:由二维的圆弧运动和垂直轴的线性运动组合而成,多用于工具机的应用中。
(4) 多轴同时运动或是同时停止:控制两个以上的运动轴做PTP的同时运动,或是同时停止。
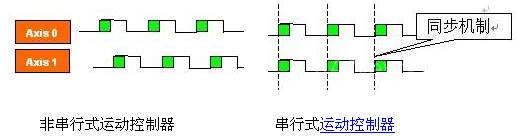
(5) 同步运动控制:通过运动控制卡的绝对同步性,可以使多轴的运动依照一定的时间顺序准确控制,也可以通过条件设定使得轴与轴之间可以依据相互关系而运动。通常这种方式的控制必须采用串行式的运动控制器才能达成,由于串行式控制器与马达驱动器有特定的通信协议,彼此之间可以依据运作的时钟,来实现绝对运动的控制。本文即是与读者分享由同步运动所发展的程序运动控制的技术。
二、目前现有的运动控制解决方案
控制核心技术
ASIC-Based
ASIC为Application Specific Integrated Circuit,特殊用途集成电路或专用集成电路。许多运动控制器会采用具有运动功能的ASIC,来达到低端或是高端的运动控制。通常ASIC已经由芯片开发厂商经过一连串测试与市场洗炼,所以稳定度与功能的验证度高,整体的指令集执行速度快,但是,缺乏可程序化能力,所以相较于DSP的运动控制卡,无扩充能力,亦无法实现绝对同步的运动控制。ASIC-based的运动控制一般适合用于步进马达、线性马达及伺服马达等的异步运动轨迹控制。
DSP-Based
近年来,由于伺服控制有实时性(Real Time)的需求,在精准时间控制的要求下,一般都采用速度较快的DSP,也有采用RISC或是一般CPU来完成的。使用高速的DSP通常会搭配高速的内存,而采用DSP的运动控制卡,由于具有可程序化的能力,所以一般使用者可以下载部分过程控制码在DSP内部执行,这样的优点在于整个控制程序享有实时性(Real Time)的特点。
[DividePage:NextPage]
串行控制技术
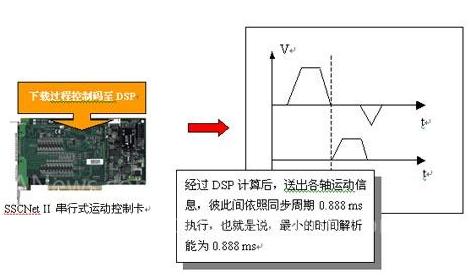
伺服马达的串行控制技术,在市场上也不少见。一般而言,串行式控制具有自己的通讯协议,使得控制器与被控制端(伺服驱动器)可以依通信协议进行资料交换,以作为运动控制或是取得相关伺服信息回到控制器本端。其通信也会依一个固定时钟做数据交换及更新动作,也就是会依据实时性的特性来运作。在此,笔者将着重于以三菱串行式的控制技术为基础,来说明程序运动控制技术。SSCNet是三菱所提出的串行式伺服控制,全文为Servo System Control Network。在第二代中,也就是SSCNetII,其实时性(Real Time)的特性为0.888 ms。
三、程序运动控制的概念
在复杂的机构与控制中,机构与时间的配合是十分的重要,尤其是多连杆的机构。如下图,一个复杂的运动机构图例。
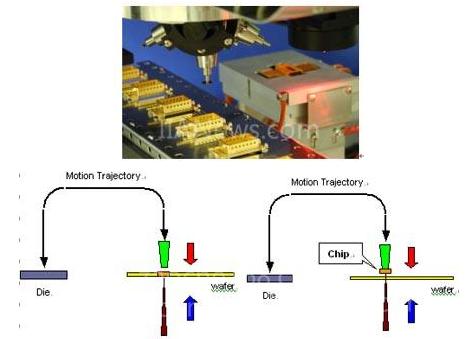
在芯片吸取的过程中,顶针也必须在准确且与机器手臂同步的时间内将芯片顶起以利于吸头的抓取,所有的机械动作都必须依赖运动控制卡的程序运动控制技术才能完成。
若串行式运动控制必须通过PC将用户的运动控制指令传达到运动控制卡上,传递过程中由于操作系统的时间延迟且非实时性,多轴之间的同步性无法很准确的实现。
如上右图所示,若不利用程序运动控制技术,那么运动指令在操作系统中传递所造成的时间差,将使其无法进行同步运动控制。因此,程序运动控制的精神在于将用户需要做到同步运动的控制轴,编成程序代码后,下载至DSP中做运算,DSP会依据串行式运动的数据更新周期时间,完成过程控制。
其观念可以参考以下的示意图:
四、为什么需要程序运动控制
过程控制技术可以为需要实时性(Real Time)控制的产业应用者,提供以下的优点:
(1) 一般的无同步机制的控制卡,各轴之间的控制为独立关系,如果要进行主轴(Master Axis)与从轴(Slave Axis)的应用,那些解决方案是无法达到这种精确控制需求的。唯有利用串行式运动控制技术,彼此间依照通信协议的固定时钟,才能依照基本时钟进行同步控制。
(2) 除串行式控制技术外,DSP的加入,可以让用户有更多的弹性加入到过程控制的流程,可程序化的优点让用户不需要通过操作系统的非实时性而造成指令延迟。可以充分利用串行式控制的实时性,而达到多轴同步控制的应用。
(3) 在过程控制中,用户可以自由选择各轴间的同步关系,例如决定了主轴运动之后,从轴可以依据主轴的位置、运动速度、或是外部的数字信号作为同步触发信号,亦可以实现动态位置补偿的功能,使得主从轴可以在时间上完美搭配。
(4) 过程控制的控制权在DSP上,所以可以大幅减少CPU的系统负担,减少通过操作系统传递运动指令所造成的时间延迟,增进往复性的控制效能。
五、结语
运动控制的技术日新月异,不论是ASIC或是DSP为核心的运动控制卡,均有其优缺点。在高端应用上,对于控制的实时性要求会是一个新趋势,串行式的通信技术加上DSP的运动控制,程序运动控制的技术将可以让用户在精密机械的控制中,提升控制精度与效能,缩短往复性运动的周期时间,进而增加机器设备的生产产能。笔者希望通过这篇文章,与对程序运动控制有兴趣者共同分享,提供另一层面的见解。
声明:本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,也不构成任何其他建议。本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,不为其版权负责。如果您发现网站上所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容,以保证您的权益!联系电话:010-58612588 或 Email:editor@mmsonline.com.cn。

- 暂无反馈
