CATIA在医疗器械设计中的应用
【编者按】总部位于德国的MAQUET是一家拥有170多年悠久历史的医疗设备和系统工程公司,隶属瑞典GETINGE AB集团。集团下设外科系统部,心脏外科部,重症系统部,所辖品牌均为行业领先者。
迈柯唯医疗设备(苏州)有限公司于2007年4月正式成立。作为集团外科系统部在欧洲本土以外的唯一的生产基地,迈柯唯苏州始终坚持高品质、高效率的制造理念,同时借鉴公司德国和法国工厂的丰富经验,向全球市场提供顶尖的医疗设备产品。主要产品有医用吊塔,手术床及其附件和医院转运产品等。
为了进一步缩短医疗器械产品的设计及生产周期,提高产品的市场竞争力,取得更好的经济效益,国内外很多医疗器械公司在产品开发过程中均采用一种或多种3D软件系统,例如Pro/E、NX、Catia或Solidworks等。迈柯唯医疗设备(苏州)有限公司于2008年在医用吊塔的产品开发中采用CATIA软件,后来扩展到手术床的产品开发设计过程。在医用吊塔的产品开发过程中,研发人员将很多成熟的设计经验和CATIA软件使用结合到一起,总结出在CATIA 软件中,医用吊塔系统开发的设计流程以及虚拟样机DMU(Digital Mockup)与关联设计集成的应用方法。由于CATIA软件的多个模块在医用吊塔产品设计的广泛使用,大大提高了产品设计的水平和质量,缩短了新产品开发和客户化产品的开发周期,加快新产品对市场需求的响应,获得客户的广泛赞誉。因此,CATIA软件在医疗器械领域充分体现了优越性和实用性。为了更好的管理CATIA软件3D模型并且实现协同设计,迈柯唯医疗设备(苏州)有限公司也导入了CATIA软件的产品数据管理平台Smarteam软件。
迈柯唯医疗设备(苏州)有限公司使用CATIA软件进行医用吊塔设计开发的核心是基于骨架模型与虚拟样机DMU集成的自顶向下(TOP-DOWN)设计方法。产品设计有两种设计理念:传统的自底向上(Bottom Up)设计和基于骨架模型的自顶向下(TOP-DOWN)设计。自顶而下的设计思路是先整体规划,后细节设计。即在产品开发的初期先按照医用吊塔的功能要求定义医用吊塔的骨架并考虑组件与零件、零件与零件之间的约束和定位关系。在完成医用吊塔的方案设计和结构设计之后,再进行单个零件的详细设计。这种设计理念不但最大限度地减少设计阶段不必要的重复工作,有利于提高工作效率,而且在产品设计后期若发现问题也可以通过修改骨架来实现相应零件的自动更新。
CATIA软件在医用吊塔设计过程
下面以医用吊塔肘部结构为例讲解TOP-DOWN设计流程的3个主要阶段:
(1)肘部结构骨架模型模型设计阶段(设计前期验证);
(2)肘部结构零部件详细设计阶段(基于骨架的建模);
(3) 肘部结构分析和验证阶段(模型装配与DMU干涉检查等)。
肘部结构骨架模型
医用吊塔肘部结构骨架模型(图1)是医用吊塔骨架模型的核心。这个骨架模型需要定义医用吊塔的相关的技术参数,如气弹簧的两端固定轴的位置,肘部结构旋转轴的位置,肘部结构与相关零件连接的位置和两个气弹簧之间的距离等。利用骨架模型除了可进行参数化关联设计外,还可修改参数实现骨架变化从而实现产品的动态变化。

图1 医用吊塔肘部结构的骨架模型
肘部结构系统模型的建立
在肘部结构骨架模型建立完成后,需要建立各个系统的零件模型。需要设计的零件包括以下6类:基于知识工程的模板设计、专用件设计、通用件设计、标准件设计、对称件设计和外协件设计。
下面以肘部结构的两个侧面连接板为例讲解子系统模型的建立。肘部结构的设计人员把骨架中肘部结构的大体外形尺寸,肘部结构的旋转轴和气弹簧的连接轴的位置从骨架传递下来,作为零件设计的外部参考,然后基于这些外部确定连接板的关键尺寸,接着完成其他非关键尺寸,这样连接板的零件设计完成(图2)。按照这种思路建立肘部结构的其他零件,肘部结构也相应完成设计(图3)。如果需要修改肘部旋转轴的位置,只需要将骨架的旋转轴的位置做修改,其相关联的零件的旋转轴的位置都会做相应的改变。
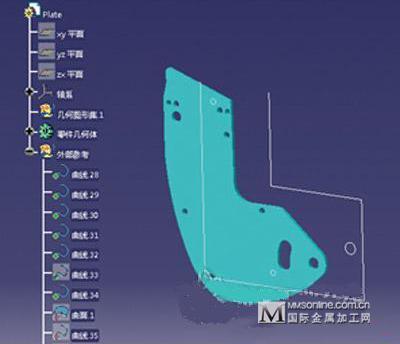
图2 医用吊塔肘部结构连接板零件模型
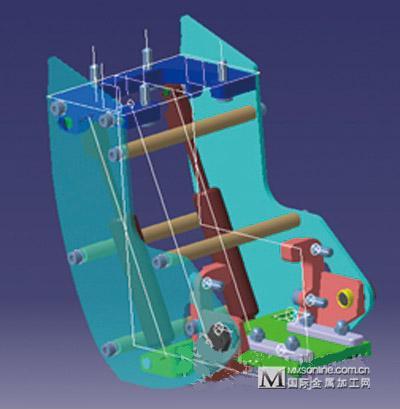
图3 医用吊塔肘部结构组件模型
肘部结构分析和验证阶段
通常,一个肘部结构需要进行以下3种分析:(1)静态、动态的干涉分析;(2) 拆装模拟分析;(3)空间占位分析。
在做各种分析之前需要检查模型的完整性。具体检查内容包括:是否是正确命名;是否处于更新状态;是否按正确的系统分类;版本是否统一等。
1.静态、动态干涉分析
做静态、动态干涉分析的目的是模拟零件在静态装配过程中和动态运动过程中是否有零件之间的相互干涉,从而提前预知零件装配和运动过程中的状态,降低了实际医疗产品发生干涉分析的风险。
静态干涉分析可以利用装配模块中的分析菜单栏中“碰撞”来实现。而动态干涉分析则相对比较复杂,它的主要步骤是:(1)定义运动机构骨架模型;(2)创建运动机构(Mechanism);(3)添加各运动副;(4)添加固定部件;(5)根据需要添加辅助模型;(6)仿真;(7) 进行相关分析。
从动态干涉分析过程的主要步骤可看出,DMU骨架模型是依据骨架设计模型得到。所以,设计与DMU分析实现了很好地集成,充分地发挥了骨架模型的作用。一个骨架模型在进行零件详细设计控制的同时,也实现了对DMU模型的控制。即骨架模型的修改可以直接反映在零件的详细设计模型上,也可以直接反映在运动机构的定义上。这样的集成式设计-分析方法可显著提高产品开发的效率和质量。
2.拆装模拟
拆装模拟的目的是为了验证产品在实际装配过程中以及在维保过程中拆装的难易程度。机械的拆装模拟的重点是定义和优化拆装路线、拆装顺序与动作,检查在拆装的过程是否有干涉情况发生,并可以生成相应的动画可方便地观看拆装过程
3.空间占位分析
利用空间占位分析可以快速得到一个系统,如医用吊塔肘部结构在设定距离范围之内的部件。对于大型装配,可以在不打开部件显示的情况下得到空间某范围内的部件组,这样便于进行大型装配的设计与分析,提高模型分析处理的速度。通过基于空间位置而进行的分组定义,有利于上下文关联设计的进行。
CATIA在医用吊塔产品开发应用是迈柯唯医疗设备(苏州)有限公司多年的设计经验与CATIA 软件完美的结合。这些方法的成功应用体现了CATIA 软件在医疗器械应用的有效性和实用性。
声明:本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,也不构成任何其他建议。本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,不为其版权负责。如果您发现网站上所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容,以保证您的权益!联系电话:010-58612588 或 Email:editor@mmsonline.com.cn。

- 暂无反馈