凌华图像运动控制卡基于PC的目标追踪系统的应用
——图像捕捉卡(Picolo)以及运动控制卡(PCI-8164)
一、系统构成与原理
1.1机器视觉
所谓机器视觉就是:赋予机器以人类视觉功能,突破人类自身视觉的局限性,把计算机的快速性、可靠性、结果的可重复性,与人类视觉的高度智能化和抽象能力相结合,由此逐渐形成了一门新学科。机器视觉系统采用CCD照相机将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,如:面积、长度、数量、位置等;根据预设的容许度和其他条件输出分析结果。机器视觉系统一般由光源,镜头,CCD照相机,图像处理单元(或图像捕获卡),图像处理软件,监视器,通讯/输入输出单元等部分组成。(见图 1)
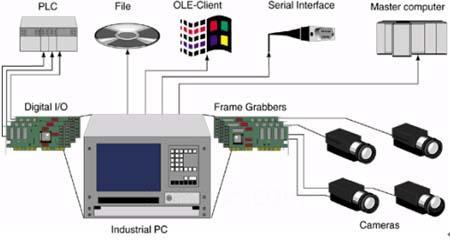
图片1
1.2伺服电机
伺服电机把输入的控制电压信号变为输出的角位移或角速度,它的运动状态由控制信号控制,加上控制电压,他应当马上旋转,去掉控制电压它应马上停转,转速高低应用控制电压成正比。相对于同样应用于运动控制的的步进电机它有如下优点:
1.控制精度更高:伺服电机的控制精度由电机轴后端的旋转编码器保证,对于17位的旋转编码器而言,驱动器每接收217=131072个脉冲电机旋转一圈,其脉冲当量为360°/131072=0.0027
2.伺服电机运转非常平稳,即使在低速时也不会出现振动现象
3.伺服电机为恒力矩输出,即在其额定转速(一般为2000RPM或3000RPM)以内,都能输出额定转矩,在额定转速以上为恒功率输出。
4.交流伺服电机具有较强的过载能力 。一般是额定转矩的2-3倍。
5.伺服系统的加速性能较好从静止加速到其额定转速3000RPM仅需几毫秒,可用于要求快速启停的控制场合。
6.伺服驱动系统为闭环控制,驱动器可直接对电机编码器反馈信号进行采样,内部构成位置环和速度环,一般不会出现步进电机的丢步或过冲的现象,控制性能更为可靠。(如图 2)
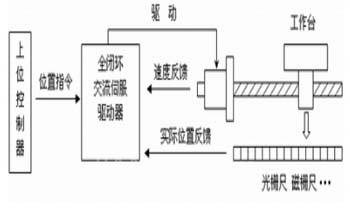
图片2
1.3 基于PC的运动控制系统
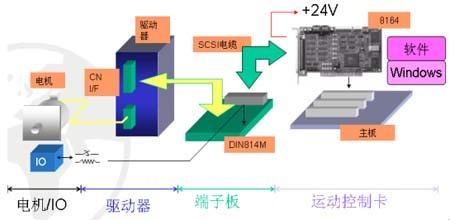
为了满足新型数控系统的标准化、柔性、开放性等要求;在各种工业设备(如包装机械、印刷机械等)、国防装备(如跟踪定位系统等)、智能医疗装置等设备的自动化控制系统研制和改造中,急需一个运动控制模块的硬件平台;同时PC机在各种工业现场的广泛应用,也促使配备相应的控制卡以充分发挥PC机的强大功能。基于PC的运动控制系统的构成如图3
图片3
上图所示是目标追踪系统的控制单元部分的结构图。选用凌华公司的运动控制卡(PCI-8164)、三菱公司的伺服电机及驱动器、和专为配合三菱伺服电机而设计的端子板(DIN-814M)。由于有相配合的端子板,整个控制部分的接线非常简单。
1.4运动控制卡:PCI-8164
1. 支持OUT/DIR和CW/CCW脉冲输出方式,最大脉冲输出频率:6.55Mpps
2. 可同时控制四轴电机,任意两轴、三轴的直线插补,任意两轴的圆弧插补
3. 支持持续插补运动
4. 梯形与S曲线速度曲线
5. 可编程控制加速与减速时间
6. 可以在运动中改变速度
7. 多轴同步启动/停止
8. 位置比较与捕捉位置功能
9. 回差补偿功能
1.5图像捕捉卡:Picolo
1. 可接1个摄像头
2. 三种模拟视频信号输入方式
3. 支持PAL / NTSC / CCIR / RS170制式
4. 一个S-Video视频输入
5. 实时视频捕捉(PCI总线主控DMA方式)
6. 四个数字量输入/输出通道
1.6图像分析软件包:Evision_EasyMatch
EasyMatch是颜色和灰度级别的模式匹配库。它可以让系统在图像中找到与基准模式相匹配的部分,并计算出目标的位置。即使目标发生旋转,等放性或任意方向的缩放,它都可以找到目标。(如图 4)

图片4
二、结束语
该系统已在标准工控机上得到验证,同时可扩展到嵌入式结构中。可应用于汽车、船舶、飞机等对尺寸有严格要求的场合。
声明:本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,也不构成任何其他建议。本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,不为其版权负责。如果您发现网站上所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容,以保证您的权益!联系电话:010-58612588 或 Email:editor@mmsonline.com.cn。

- 暂无反馈