基于欧姆龙PLC的旋臂采样机自动控制系统设计
引言
入场煤旋臂采样机是焦化、火电行业的一个重要采样设备。为了保护设备,在采样时必须有效的控制其回转角度在规定的范围之内,因此设置了回转保护装置。传统的保护装置是在回转体的下部安装行程开关,此开关易损坏,使设备的回转保护失效。
1 简介
随着国民经济的发展,原煤耗用量持续增长。近两年来,全国煤炭资源出现了供应紧张的局面,尤其是电力用煤全面告急,部分电厂陷入了停机待煤的尴尬境地;同时,由于电煤供应日趋市场化、多元化,造成煤质波动幅度增大,煤种杂、入炉煤质控制难度加大,使发电厂锅炉燃煤偏离设计煤种,锅炉稳定燃烧受到破坏,引发的设备缺陷明显增多,严重影响了锅炉安全经济稳定运行。火力发电行业的主要原料——煤炭,逐步全面推向市场,价格也随之开放,煤炭的费用在火力发电厂的成本已占70~80%的份额;焦化行业也面临着同样困境。因此,对煤炭质量的检测,已也引起火力发电、焦化行业的高度重视。以前的检测是工作人员到煤厂随机采取一份煤样送往化验室化验,化验室根据此样品的化验结果核算成本。这样的采样方法既浪费时间,工作环境较差,样品的代表性准确性不高,从而使自动化设备采样替代人工采样势在必行。进入90年代,入场煤采制样设备(汽车入场煤,火车入场煤)达到了迅速发展。同时,自动化技术在入场煤采制样设备的广泛运用,极大地把工人从繁杂的体力劳动和不安全的工作环境中解放出来,显著地改善了工人的工作环境和提高了工人的工作效率。针对这种情况,我公司研发出一种新型全自动旋臂采样机,该设备在山西长治地区焦化行业投入应用后,取得了良好的经济效益。
入场煤旋臂采样机是焦化、火电行业的一个重要采样设备。为了保护设备,在采样时必须有效的控制其回转角度在规定的范围之内,因此设置了回转保护装置。传统的保护装置是在回转体的下部安装行程开关,此开关易损坏,使设备的回转保护失效。我公司在对山西屯留焦化厂旋臂采样机的设计过程中,利用可编程计数器的高速计数器功能配合旋转编码器的使用,有效地实现了对回转角度的测量和对设备的回转保护,提高了设备的可靠性、准确性,使旋臂采样机所采样品更具有代表性。下面将从旋转编码器的机械安装、电气接线、plc的组态、计算机自动控制等几个方面进行介绍。
2 旋臂采样机机械组成部分及工作原理
2.1 机械部分
旋臂采样机机械部分由支架、平台、旋臂、小车走行机构、升降机构、螺旋采样机构组成。
2.2 控制系统及工作原理
本系统采用pii的研华工控机,捷瑞公司的rs232转rs322/485工业通讯卡,数据库采用与工厂信息管理系统相一致数据库visual foxpro6.0,采用视频捕捉卡,图像分割器及闭路监控系统。现场检测仪表对生产中各个参数自动、连续地进行检测,同时将信号反馈给现场plc和上位机,并在上位机显示器上显示出来;plc和上位机比较程序中设定的工艺参数,自动地调节某台设备的工况(启动、停止)及存储煤质数据,从而自动满足生产过程需要。
采用欧姆龙公司欧姆龙c200系列可编程控制器为控制核心,另有两块i/o模块,一块输出模块,一块8输入的模拟量转换模块,用于转换在线分析仪检测到的数据。各种开关量及模拟量输入到plc后,由上位机发出执行指令,plc经过运算后,将其运算结果输出到电机、电动液压推杆等执行机构。硬件部分还采用了欧姆龙接近开关。其控制原理图如图1所示。

图1 自动旋臂采样机控制系统原理图
[DividePage:NextPage]
(1)上位机与plc通信
本系统采用了北京亚控科技发展有限公司的组态王6.0作为组态软件,通过plc编程口与上位机通信。组态王6.0是运行于microsoft windows nt / xp 中文平台的全中文界面的组态软件,采用了多线程、com组件等新技术,能够实现适时多任务,具有开放的程序接口,可以自由地存取数据,且与各种关系数据库能够完整连接。
(2)系统功能
本系统的操作完全由上位机完成,操作人员运用鼠标点击要操作的对象,上位机通过组态王6.0将指令传递给plc,plc经过运算后决定要进行的工作。系统设置了两种工作方式:手动运行、自动运行。
3 回转保护及实现过程
旋臂采样机核心技术部分是回转部分,当采样时,圈定采样区域,出现采样点位后,采样点的坐标一经确定,坐标(x,y)的数值也就确定,横坐标通过旋臂角度确定,通过公式y=ktgβ,其中系数k由减速机的减速比和电机转速确定,β为旋转角度。采用plc控制,其原理是利用与回转机构连接的编码器向plc发出脉冲,plc通过接收的脉冲信号进行高速计数,当与回转角度对应的脉冲超出所规定的范围时,plc根据组态逻辑对回转液压电机进行相应的控制,从而达到保护设备的要求。小车纵向行走直接通过编码器向plc发出脉冲,plc通过接收的脉冲信号进行高速计数,根据上位机所赋值进行调节。
3.1 编码器的机械连接
回转驱动装置设置在转盘上,驱动原理为液压电动机带动涡轮减速机,通过联轴器经由传动轴,带动小齿轮啮合固定在门座架上的大齿轮圈使回转部分转动。为了使旋转编码器与回转驱动装置相连接,工程实施中的编码器与涡轮输出轴之间增加了连接轴,图2为旋转编码器与回转驱动装置连接示意图。这样当驱动装置带动小齿轮啮合大齿轮圈使回转部分转动的同时,也带动旋转编码器旋转,从而使回转部分的回转与编码器的轴的旋转建立了相对应的关系,也为plc对回转电机的控制奠定了基础。
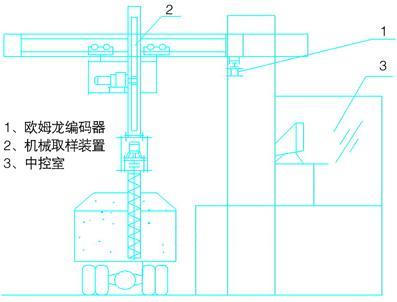
图2 编码器与回转驱动装置连接示意图
3.2 旋转编码器与plc的接线
在旋转编码器与回转驱动装置连接好后,需将编码器的脉冲信号输入plc中。这次改造,plc仅连接一个旋转编码器,故采用plc内置的高速计数器0来计数,不需另外配置高速计数器模板。因采样机回转时可2个方向回转,故编码器使用2个方向脉冲信号,即递计数增脉冲和递减计数脉冲。信号接线时,旋转编码器的a向脉冲接在plc的00004输入点,b向脉冲接在plc的00005输入点,复位z信号接在00006输入点。图3为编码器与plc接线图。因编码器e6b2-cwz6c为pnp开集输出,故接线应严格按照图2中所示,不得接反,cpu的com端接+24v否则编码器不工作。
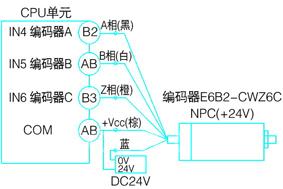
图3 编码器与plc接线图
[DividePage:NextPage]
3.3 旋转编码器在plc中的组态
(1) plc与编程设备的连接
系统采用vc++开发了一套系统,采用组态王通讯,利用安装有编程支持软件的工控机,通过与欧姆龙plc的连接对程序下载、调试、在线监测,极大的缩短了工程人员的编程、调试工作。
(2)保护功能实现方法分析
在设计时,将采样机悬臂与轨道中心线的平行位置设为初始位,其与轨道中心线的夹角定义为初始位置角,悬臂在初始位向右方时,位置角为正,相反悬臂在初始位向左方时,位置角为负。设初始位的位置角为0°,对应旋转编码器的脉冲设为p0=0;当悬臂在初始位的右方时,位置为正,悬臂向右旋转时,脉冲数值增加,位置角变大,悬臂向左旋转时,脉冲数值递减,位置角变小;悬臂向左转时,脉冲数值及位置角的绝对值都增大,但脉冲数及位置角的方向均为负,悬臂向右旋转时,脉冲数值及位置角的绝对值减少,如图4所示。

图4 悬臂回转角及脉冲数值范围
控制方式为:采样开始时,当p1 欧姆龙编码器选型为e6b2-cwz6c,p0=200p/r,k1=6,根据回转驱动装置的传动系数算出k2=70,故pv=420α。为此,根据回转保护要求,采样时的两个对应回转限位位置的编码器脉冲值p1、-p1及采取煤样时的两个对应的回转限位位置的编码器脉冲值p2 、-p2及悬臂回转180°时的脉冲值p3,均可通过公式得出。
(3)plc编程
在使用cpu内置的高速计数器0时,在执行程序前必须在编程模式下进行有关pc设置设定,包括对dm6638进行输入刷新字设置及对dm6642进行高速计数器0设置。
4 程序控制
利用plc的高速计数器0实现回转保护的程序。程序中ctbl指令的功能是在plc上电的第1个扫描周期中,登陆区域比较表,并启动比较,比较表的通道为dm0000,非微分型ini指令执行的操作是在plc上电的第1个扫描周期中,将hr00和hr01通道的内容(plc断电前瞬时的高速计数器的当前值)传送到高速计数器的当前寄存器sr230和sr231中,作为高速计数器的新当前值。块传送指令xfer的功能是实时将高速计数器的当前寄存器rs230和rs231通道的内容传送到hr00和hr01中。因此,plc断电后,仍能记住采样机悬臂的当前位置。
ar11.00~ar11.07为高速计数器0的范围比较值,即当高速计数器0的当前值落入对应的8个区域时,对应此标志位为1,否则为0。图中用了4个标志位ar11.00~ar11.03,分别对应4个区域范围满足条件标志。
5 程序调试
利用装有支持软件的移动计算机与plc的连接,使用支持软件提供的各种调试功能实时对plc程序进行调试。调试时需注意两点:
(1)一是采样机悬臂与轨道中心线平行时,将输入点0.03接置on,对高速计数器0进行复位;
(2)二是实际采样机悬臂旋转时,高速计数器的脉冲增减的方向和设计时可能不符,如设计时,使悬臂右转时脉冲递增,左转时脉冲递减,实际可能恰恰相反。
(3)解决方法:一是调节编码器的a、b向接线,二是在比较表中调整设定时数据及方向(正、负号),参照图4,若原区2在比较表中设定区域为p1
[DividePage:NextPage]
6 问题及解决
设计时原计划采用西门子plc226+欧姆龙编码器+欧姆龙接近开关,但在实际工程工作中,因采用的编码器为npn型,plc的公共端需接成+24v,这给整个弱电系统带来很大隐患,后采用欧姆龙plc后,这一问题达到完美的解决。由于旋转编码器的应用,使旋臂采样机的回转保护功能变得准确、可靠且易维护,有效地解决了传统设备系统中采用行程开关方式出现的动作不可靠、设备易损等问题。同时也为采用欧姆龙旋转编码器对采样机的仰俯角度的精确控制及保护问题提供了技术基础及实现依据。
7 结束语
自动旋臂采制样机是针对燃煤焦化厂对控制入厂煤的质量而研发的产品,采制样装置通过精心设计,具有结构简单、性能可靠、采样精度高、对煤中的难碎异物具有很强的适应能力等特点。控制系统采用“xd——2000监控系统”及“可编程程序控制器”二级控制,既满足大量数据的实时运算处理,又达到控制要求,各控制单元、执行机构、检测原件都充分考虑了其可靠性和抗干扰性。采样系统的设计、制造完全符合有关国家标准和国际标准,可保证采样数据准确性,满足商业结算或正平衡计算发电煤耗的要求,实践证明该系统控制可靠,界面友好、操作方便。由于老式旋臂采样机在山西有很大的市场,本系统也可用于老式旋臂采样机的改造;该装置不仅可用于焦化厂、燃煤电厂及类似以煤作燃料的大型企业,也可用于冶金、矿山、港口等行业矿粉类物料采样。
声明:本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,也不构成任何其他建议。本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,不为其版权负责。如果您发现网站上所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容,以保证您的权益!联系电话:010-58612588 或 Email:editor@mmsonline.com.cn。

- 暂无反馈