PLC在发信系统中的应用
引言
本文介绍了基于plc的发信系统控制方案,并据此设计和建成了一个完整的监控系统。系统组网简洁,软件层次清晰并满足可靠性和可扩展性。实现了对发射系统自动化、智能化的控制。
1 简介
发信系统调度中心完成对发信系统高压设备的控制、监测、状态和工作参数显示、故障提示,同时完成与发信系统其他控制设备通信等功能。由plc构成的控制柜在线采集运行数据和确定运行状态,并将它们传输至调度中心,控制柜接收调度中心指令对发信系统的设备实施控制,构成完整的监控系统。该系统的设计目标是实施对发信系统多种设备进行远程监视、控制、测量,实现无人值守,对各种瞬间发生的电气事故进行分析判断,对现场众多电气数据进行记录和统计处理。
2 系统设计
基于plc设计的监控系统由三个部分组成:1 设置在调度中心的操作终端设备;2 分布在设备现场的五个控制柜;3 数据传输通道。系统结构图如图1所示。
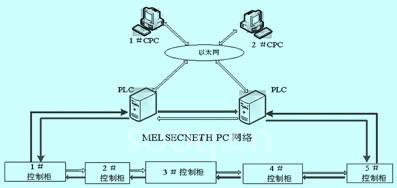
图1 系统组成框图
由图1看出:系统包括上位机和下位机两部分。上位机是指调度中心的1#cpc、2#cpc(操作终端),其中包括hmi(human machine interfa -ce)系统和数据库管理系统,功能是遥控操作,遥信、遥测显示及数据报表统计,记录事故分析等。而下位机是指数据采集系统及各种智能控制设备,在这里指的是plc控制箱和5个控制柜。
2.1 由plc模块构成的控制柜
下位机的关键设备是采用plc构成的五个控制柜。该方案采用模块式结构,可根据应用需求进行灵活配置和可以扩展。采用plc的控制柜基于几点考虑:
(1)系统为闭环监控工作方式,对于控制过程的安全性要求较高;
(2)plc具有高可靠性和极强的抗干扰能力;
(3)模块化配置实现多功能扩展。
2.2 plc 编程软件
plc编程用基于microfost windows环境的编程软件gx developer v8.26开发。以实现现场数据的采集、计算、统计、数据通信、系统故障诊断等功能。gx developer v8.26符合iec-1131-3 编程语言标准,有梯形图、顺序功能图、功能块图、结构化文本、指令表。gx developer v8.26t提供了实用简单友好的用户界面,有丰富的编译工具、强劲的搜索功能、自由格式的图形编辑器、完善的在线帮助,使得对modicon tsx momentum(模块式momentum plc组板)构成的自动化控制系统的程序编写、软件调试、系统维护十分简单。
[DividePage:NextPage]
2.3 系统软件设计
系统上位机采用mcgs(monitor and control generated system)组态软件、mcgs是一套基于windows平台的,用于快速构造和生成上位机监控系统的组态软件系统,可运行于microsoft windows 95/98/me/nt/2000等操作系统。mcgs为用户提供了解决实际工程问题的完整方案和开发平台,能够完成现场数据采集、实时和历史数据处理、报警和安全机制、流程控制、动画显示、趋势曲线和报表输出以及监控网络等功能。mcgs具有操作简便、可视性好、可维护性强、高性能、高可靠性等突出特点,在石油化工、钢铁行业、电力系统、水处理、环境监测、机械制造、交通运输、能源原材料、农业自动化、航空航天等领域已进行了成功应用。目前,mcgs组态软件具有整个工业监控系统的从设备采集、工作站数据处理和控制、上位机网络管理和web浏览的所有功能,很好的实现了自动控制一体化的功能。使用mcgs,可以在短时间内完成一个运行稳定、功能全面、维护量小并且具备专业水准的计算机监控系统的开发工作。
2.4 系统网络结构
系统采用标准的开环总线以太网配置。这样不仅降低了成本,方便布线,易于扩展;而且网络结构上保证了信息传输的安全性,能对数据进行有效的分流,从而减轻网络负荷,增强了系统的可靠性。其网络标准为ieee802.3;传输速率为10mbps。整个系统采用10/100m以太网交换机形成自适应以太网通信。
控制柜设备之间的数据传输采用plc专用网络melsecnet/h组成控制层网,melsecnet/h网络是通过光纤连接plc控制器与plc控制器的专用网络,通过使用高速通信和大容量的链接软元件,在控制系统设备之间实时地传递和设备的运转、动作相关的数据,可以实现25mbps的高速通信,光纤采用双重回路提高了系统冗余性和可靠性。
上位机与下位机的通信是监控系统的一个关键。我们选用mcgs的设备构件用于实现以态网模块(qj71e71-100)和三菱q系列plc通讯。三菱q系列tcp/ip设备构件把plc的通道分为只读,只写,读写三种情况,只读用于把plc中的数据读入到mcgs的实时数据库中,只写通道用于把mcgs实时数据库中的数据写入到plc中,读写则可以从plc中读数据,也可以往plc中写数据。
通信网络采用主从方式定时收发数据。在本系统,上位机定义为主设备,下位机五个控制柜所有智能监控装置定义为从设备,只有主设备能初始化或对从设备查询。所有设备都有规定的ip地址或站地址,主设备按地址发布消息,从设备根据主设备查询或提供的数据决定要产生何种行动,实现了系统的监控功能;同时当系统故障,比如五个控制柜中有某一个从网络中断开,在主设备端马上诊断出来,而当故障修复后,网络又可自动接通,这样有利于操作员进行系统功能诊断。
3 系统工作过程
下位机从现场设备采集遥信及遥测信号,经过一定的处理后存储到plc的寄存器中供上位机读取;同时接收上位机发送的遥控命令经过处理后传给现场设备。而上位机则是负责从下位机读取遥信量和遥测量,经过处理后进行显示或生成报表等;同时根据操作员的需要发出遥控命令。下面分别介绍系统的具体工作过程。
3.1 系统通信
整个系统的通信都是基于ip地址的。
(1)上位机和下位机的通信,是通过为mcgs组态软件的各个数据建立通信通道来实现的。
(2)下位机之间的通信:下位机之间的通信通过melsecnet/h网络完成melsecnet/h网络具有的ras功能,ras功能代表可靠性、可用性、可维修性。melsecnet/h网络具备环路回送功能,在光纤环路系统中,传送路径是双结构,当传送路径中发生错误时,通过把传送路径从正向环路切换成反向环路或从反向环路切换成正向环路或进行环路回送来断开故障区,在仍然能够进行数据通讯的站之间继续正常传送。
正常时使用正向环路或反向环路进行数据链接,如图2所示。
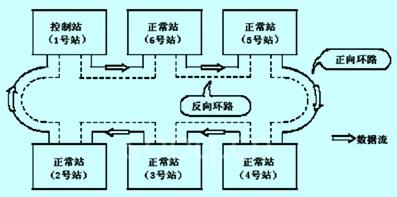
图2 melsecnet/h网数据链接环路
[DividePage:NextPage]
异常时正向环路反向环路中出错,使用反向环路正向环路继续数据链接,如图3所示。

图3 melsecnet/h网数据链接环路
3.2 下位机接受遥控(yk)命令
上位机往下位机写的遥控(yk)命令,是以一个字(word)为单位的,一个字包括16位(bit),每一位(bit)代表一个遥控信号。每个遥控对象又有两种操作状态(如断路器的分闸和合闸)。从上位机来的16位的遥控字(word)存到plc的cpu处理器通信适配器的寄存器的某个区(如400011)中,当操作员发出一个遥控命令时,相应的遥控位由0变为1,离散量基板上对应的输出端被置为高电平,被控制的断路器受电动作。通过设置让输出端的高电平维持2秒钟,以确保断路器操作机构动作使断路器跳闸或合闸。
由于plc模拟块是低电压低电流输入,而控制回路电压电流比较大,因此需要用继电器来进行电气隔离放大。
3.3 下位机遥信(yx)信号处理
遥信(yx)信号包括位置信号和非位置信号,位置信号包括断路器和隔离开关的分、合状态;非位置信号包括保护信号和故障信号的状态。遥信信号是由momentum的离散量基板进行采集的,离散量基板把从现场设备送上来的16位离散的输入数据以一个字(word)的方式传送给cpu处理器通信适配器,再由cpu处理器与上位机建立通信、传送数据。
3.4 下位机遥测(yc)信号处理
遥测信号是用8通道输入差分基板采集的,我们采用的是平均值变送器,把控制柜一次回路中的交流电压和电流以直流平均值表示,再输入到模拟量基板中。基板的8输入通道是为8个模拟量输入提供的,每个模拟量占用一个通道,每个输入通道对应一个输入字(word);由于模拟量aai基板上扣有momentum的cpu处理器适配器,因此由基板传上来的模拟量信号直接存到cpu处理器的寄存器中供上位机读取;而每个通道的输入参数则通过concept中硬件配置中的i/o map进行设定。
3.5 上位机功能实现
上位机运用mcgs组态软件主要实现以下的功能模块:欢迎画面、主画面、系统运行记录、设备配置图、控制柜实况图、电压电流显示图、控制柜控制屏、事件记录、报警记录、模拟屏显示、曲线、重载数据库、程控操作、报警画面、数据备份与恢复、模拟控制柜接线图、系统帮助画面。
采用mcgs自带的数据库的报表管理系统对整个控制系统产生的数据进行查询、打印、转出、计算、分析。该系统主要有以下功能:日报管理、月报管理、操作事件管理、异常事件管理、报警信息管理、图形分析。
报表管理系统还具有丰富强大的电子制表功能。通过动态数据交换(dde)和odbc标准,可方便地将系统的实时数据、历史数据库、应用数据库与报表系统链接,可生成柱形图、条形图、面积图等二维或三维的彩色图型,形成图文并茂、直观清晰的图文报表,并可召唤、定时和条件驱动打印报表。
3.6 web功能实现
在本方案中,所采用的mcgs软件为网络板因此不需要任何特殊的配置,只要有一台配置了web浏览器(如ie、netscape navigator)的pc机就可以通过以太网浏览到上位机的web 网页。实时地显示该上位机点的运行状况。
4 结束语
本文介绍了基于plc的发信系统控制方案,并据此设计和建成了一个完整的监控系统。系统组网简洁,软件层次清晰并满足可靠性和可扩展性。实现了对发射系统自动化、智能化的控制。
声明:本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,也不构成任何其他建议。本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,不为其版权负责。如果您发现网站上所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容,以保证您的权益!联系电话:010-58612588 或 Email:editor@mmsonline.com.cn。

- 暂无反馈