分析:数控机床进给系统的精度
数控机床的伺服系统按其控制方式,可分为开环、半闭环和全闭环三类,现结合相关精度分析如下
1.开环进给系统
数控机床基本上不用开环进给系统。它虽然简单,但如果负荷突然加大,或者脉冲频率变化剧烈,则执行 不见得运动可能发生误差,这就是常说的“失步”现象。
2.半闭环进给系统
半闭环系统的误差,包括丝杠的导程误差、丝杠轴承的轴向圆跳动、伺服系统的误差和伺服系统闭环之外 ,还包括个机械环节弹性变形引起的误差。
(1)定位精度计算
在进给系统内,存在各种干扰因素如摩擦力、切削力及惯性力等。伺服系统在这些因素的作用下,必然产 生位置偏差。为了抵抗这些干扰,伺服电动机必须提供一定的输出力矩。这个力矩与位置偏差之比,成为 伺服刚度kR,输出量为伺服电动机的输出转矩,输入为位置偏差角,单位为N·m/rad。伺服刚度kR为单位 位置偏差,电动机能产生多大的转矩以克服外界的干扰,计算公式如下
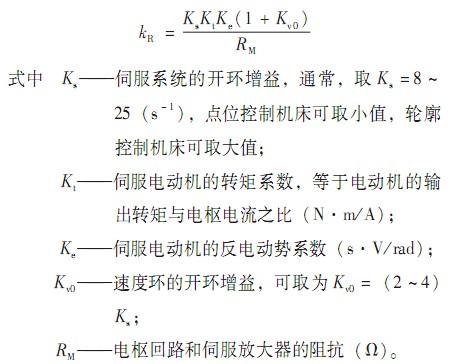
把这个伺服刚度kR折算至移动部件
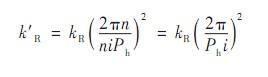
式中 i ——电动机到丝杠的传动比。
计算出移动部件的伺服刚度k'R,滚珠丝杠副的接触刚度kN,滚珠丝杠的最小拉压刚度kKmin和丝杠轴承的轴 向接触刚度kT后,按弹簧串联原则合成

半闭环进给系统的定位精度实在无切削空载条件下检验的。因此,载荷只是导轨的摩擦力Ff,因Ff而引起 的误差δ为 δ=Ff/kΣ
δ加上丝杠任意300mm内的导程公差和轴承的轴向跳动,不应超过要求的定位公差。
(2)重复定位精度计算
如果伺服系统施加在移动部件上的力不超过导轨间的最大静摩擦力Fst,则移动部件是不动的。静摩擦力 除以系统综合刚度,就是不灵敏区(死区)△。△就是最大重复定位误差
△=±Fst/kΣ
(3)提高定位精度的途径
经过计算,如果发现定位精度不够,可以通过下列途径来提高:①提高丝杠精度;②提高各环节的刚度。
应先考虑提高刚度较低的环节的刚度。如果伺服刚度较低,可适当加大系统增益Ks。但是刚度过大,可能 会引起系统振荡。提高机械环节的刚度可以有下列途径:适当加大丝杠直径;增加滚珠的圈数和列数;改 一端轴向固定为两端固定;改变推力角接触轴承的组配方式。
如果上述措施都不奏效,则说明半闭环系统已不能满足要求,应改用全闭环系统。
3.全闭环进给系统
各机械传动环节都已包括在闭环之内,其误差可由闭环系统纠正。闭环系统的误差为反馈装置(如光栅、 感应同步器等)的误差和伺服系统的误差,这是无法避免的。
声明:本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,也不构成任何其他建议。本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,不为其版权负责。如果您发现网站上所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容,以保证您的权益!联系电话:010-58612588 或 Email:editor@mmsonline.com.cn。

- 暂无反馈