基于MPC07运动控制卡的步进电机控制系统研究
关键词:MPC07;步进电机;控制系统;VB
ZHANGWei-xing, WANG Chun-sheng, SHEN Xiao-qiang
0 引言
随着机电一体化的不断发展,现代工业中运动控制系统也随之更新换代,从PLC、单片机、运动控制卡到专业的运动控制单元,控制方法越来越先进,控制策略越来越多,并不断诞生出一代复杂而柔性的设备和机器。
MPC07运动控制卡是基于PC机PCI总线的步进电机或数字式伺服电机的上位控制单元,它与PC机构成主从式控制结构, PC机负责人机交互界面的管理和控制系统的实时监控等方面的工作,MPC07卡完成运动控制的各种细节,譬如每个轴的运动依靠输出脉冲和方向信号、在运动过程中能够自动升降速的处理、以及实现回原点起保护作用的限位开关信号等。每块MPC07卡可控制4轴步进电机或数字式伺服电机,并支持多卡共用以实现多于4个运动轴的控制。该卡是基于FPGA设计,能够提供各种运动控制功能。
用户可根据控制系统的要求编制人机界面,并调用MPC07运动函数库中的指令函数,就可以开发出满足要求而且成本低廉的多轴运动控制系统。
1 MPC07运动控制卡的原理
MPC07配备了功能强大、内容丰富的Windows驱动程序、DLL函数库。MPC07在插补算法和运动函数的执行效率方面采用了更有效的方法,提高了插补精度、插补速度和实时性。 MPC07运动函数库用于二次开发,用户用VisualBasic或VC + +支持Windows标准32位动态链接库(DLL)调用的开发工具编制所需的用户界面程序,并把它与MPC07运动库链接起来,就可以开发出自己的多轴运动控制系统,例如:数控系统、检测设备、自动生产线等。MPC07的运动函数库能够完成与运动控制有关的复杂细节:升降速计算、行程控制、多轴插补等,这样就可以大大缩短控制系统的开发周期。
MPC07控制卡的运动控制功能主要取决于运动函数库。运动函数库为单轴及多轴的步进或伺服控制提供了许多运动函数:单轴运动、多轴独立运动、多轴插补运动等等。
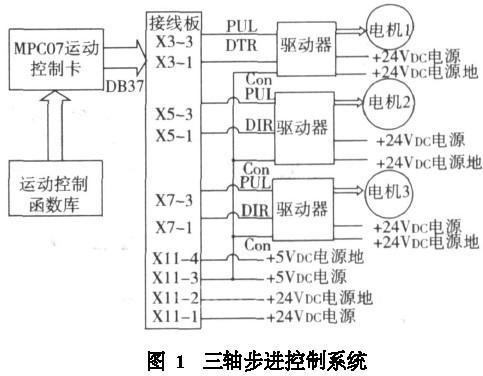
另外,为了配合运动控制系统的开发,还提供了间隙补偿功能。图1为MPC07控制卡在三轴步进控制系统中的应用。
2 运动控制系统工作过程
利用MPC07的动态链接库(DLL ) ,开发者可以很快开发出Windows平台下的运动控制系统。MPC07动态链接库是标准的Windows 32位动态链接库,选用的开发工具应支持Windows标准的32位DLL调用。
首先进行程序初始化,设置运动参数以及板卡参数,运动参数有各种运动速度、加/减速、升降速类型等,板卡参数有卡的数量、各卡上的轴数等。如果硬件设置错误,软件在运行时发生错误,则调用失败,需重新设置。
步进电机的直线运动:独立运动和插补运动。
独立运动指各控制轴的运动之间没有联动关系,可以是单轴运动,也可以是多轴同时按各自的速度运动。点位运动、连续运动和回原点运动都属于独立运动。
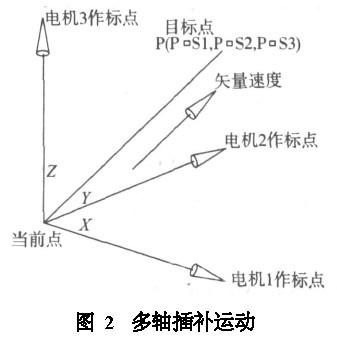
插补运动是指两轴或三轴按照一定的算法进行联动,被控轴同时启动,并同时到达目标位置。插补运动以矢量速度运行,矢量速度分为常矢量速度和梯形矢量速度。多轴插补运动(图2)只有线性运动,它们的运动速度由矢量速度决定,各轴的速度为矢量速度在各轴上的分量。
下面一段代码是使两轴以常速度作直线插补:
set_vector conspeed (2000) 设置矢量常速度为2000个脉冲;
con2line2 (1, 2000, 2, 2500) 轴l移动2000个脉冲,轴2移动2500个脉冲。
下面一段代码是使两轴以梯形速度作直线插补:
set_vector p rofile (500, 2000, l000)设置矢量梯形速度:低速为500个脉冲,高速为2000个脉冲,加速度为1000个脉冲;
fast_line2 (1, 2000, 2, 4000)轴I移动2000个脉冲,轴2移动4000个脉冲。
3 程序设计
下面利用VB编制图1三轴电机的运动,运动参数包括轴号、初速度、最高速度、加速度和移动距离等,使得三轴能够连续运动、回原点,并能够读取当前轴号、位置和速度。图3为用VB编制的三轴运动功能框图。

部分程序如下:
Op tion Exp licit
Dim AxesNum As Long轴号
Dim lowspeed AsDouble初速度
Dim highspeed AsDouble最高速度
Dim Accel AsDouble加速度
Dim DisAs Long移动距离
′*
********************************************
该函数对板卡进行设置,可在窗体加载时调用:
Private Function SetBoard ( ) As Integer
Dim Rtn As Integer
Rtn = auto_set( ) ′对板卡进行自动设置
If Rtn < = 0 Then ′若自动设置错误则返回0
SetBoard = - 1
Exit Function
End If
Rtn = init_board
If Rtn < 0 Then
SetBoard = - 2
Exit Function
End If
SetBoard = 0
End Function
′*
********************************************
′读取用户设置的运动参数:
Private Sub GetParam ( )
AxesNum =Val( txtAxesNum. Text)
lowspeed =Val( txtLowSpeed. Text)
highspeed =Val( txtHighSpeed. Text) ′
Accel =Val( txtAccel. Text)
Dis =Val ( txtDis. Text) ′
set_maxspeed AxesNum, highspeed
set_conspeed AxesNum, lowspeed ′设置常速运动参数
set_p rofile AxesNum, lowspeed, highspeed, Accel ′设置梯形速度运动参数
End Sub
读取并显示状态(当前的位置和速度)
Private Sub timGetdata_Timer( )
Dim posAs Long
Dim speed AsDouble
get_abs_posAxesNum, pos ′读取位置
labPos. Cap tion = pos ′显示位置
speed = get_rate (AxesNum) ′读取速度
labSpeed. Cap tion = speed ′显示速度
End Sub
4 结束语
介绍了MPC07运动控制卡的工作原理及其应用,在VB环境下三轴步进电机的运动,当然,运动控制卡的运动函数库还能够完成与运动控制有关的复杂细节,比如升降速直线插补,梯形速度直线插补等,这样就能够实现更完善的运动控制系统。
参考文献:
[ 1 ] 彭韬,周学才. 基于国产MCT8000运动控制卡的开放式结构机器人控制系统[ J ]. 制造业自动化, 2001, 71 (7) : 65267.
[ 2 ] 王振华,朱国力,郭长旺,等. 基于DSP和CNC多轴运动控制器研究[ J ]. 制造业自动化, 2000, 22 (3) : 10213.
声明:本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,也不构成任何其他建议。本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,不为其版权负责。如果您发现网站上所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容,以保证您的权益!联系电话:010-58612588 或 Email:editor@mmsonline.com.cn。

- 暂无反馈



