一种数字可调的升压型开关电源的设计与实现
1 引言
近年来,数字化在电源领域得到广泛应用,许多电子设备要求电源具有多档级。因此,这里提出了一种利用数字控制、电压可调的开关电源设计方案,实现电压步进调整,并具有宽电压输入、稳压输出功能。
2 设计方案
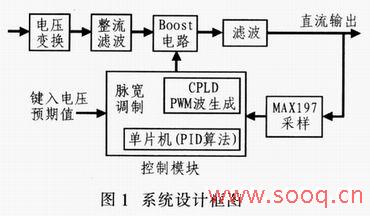
方案系统设计框图如图1所示,输入为220 V,50 Hz交流电压,经电压变换,整流滤波后得到18 V的直流电压,送入Boost电路,经滤波输出直流。CPLD与单片机组成的数字控制模块输出脉宽调制信号(PWM),由按键控制改变PWM占空比,从而控制Boost电路的输出电压。该输出电压可在30~36 V范围内步进调节,实现多路电压输出。最大输出电流高达2 A。
输出电压经MAXl97 A/D采样,送至控制模块,通过PID算法计算调整下一次传送的控制信号,形成反馈回路,实现宽电压输入,稳压输出的功能。
3 硬件电路设计
3.1 硬件电路图
系统硬件电路如图2所示。交流电压经变压器转换,其幅值按一定比例降低。降低的交流电压经扁桥式整流电路整流为18 V直流,经2 200μF电容滤波后进入主转换电路与Boost电路。
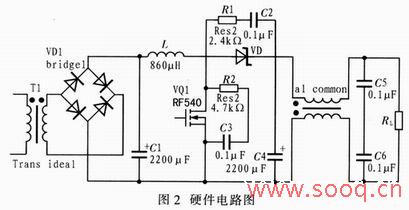
在Boost转换电路中,增加MOSFET和二极管缓冲吸收电路,减小过压或过流引起的损耗。由于电源功率较小,则采用RC吸收电路。当过流、过压产生时,电流通过电阻以热能的形式将能量散发出去,降低对MOSFET的影响,减小其损耗,延长使用寿命。根据多次试验,保护吸收电路的电阻应取kΩ级,电容取nF级。直流信号再经低通滤波器滤除纹波,驱动负载。
3.2 主要功能电路原理
硬件电路部分的主要电路是Boost电路,它由功率开关管VT、储能电感L、续流二极管VD和滤波电容C组成。开关管按一定频率工作,转换周期为T,导通时间为Ton,截止时间为Toff,占空比D=Ton/T。其工作原理为:当VT导通时,电感L储能,VD反偏截止,负载由电容C提供电能;VT截止时,L两端电压极性相反,VD正偏,同时为负载和滤波电容C提供能量。
由储能电感L导通和截止期间,电流变化量相等可得,输出电压U0和输入电压U1之间关系为:
U0/Ui=1/(1一D) (1)
3.3 器件选取
根据理论计算,功率开关采用晶体管即可满足要求,故系统采用IRF540型MOS管,其VDS=100 V,IDS=17 A。采用MOS管专用驱动器件IR2110完成驱动功能。IR2110是一款高低电平驱动器件,其逻辑输入电压只需3.3 V,输出电压最大可达20 V,驱动电流最大可达到2 A。其延迟时间为10ns,上升沿和下降沿时间分别为120 ns和94 11s。由于IR2110可同时驱动双MOS管,因而系统只涉及一个MOS管,故只使用一路驱动即可。
由于普通二极管的反向恢复时间过长,而肖特基整流管无电荷储存问题,可改善开关特性。其反向恢复时间缩短到10 11s以内。但其反向耐压值较低,一般不超过100 V。因此肖特基二极管适用于低压、大电流状态下工作,并可利用其低压降提高低压、大电流整流(或续流)电路的效率。
3.4 重要参数的计算
滤波电容的选取,可根据

当开关管工作频率取F=40 kHz时,设纹波电压约为30~50 mV,则计算得到C数量级为1 000μF。实际调试后取电容为2 200μF。
储能电感的选取,可根据:

设计过程中,设置纹波电流△iL=O.4 A,计算得到L数量级为l mH,实际调试后取电感为0.79 mH。
4 软件设计
选择CPLD和51系列单片机组合设定数字控制和输出电压步进。用单片机控制整个系统。软件设计除设定初始电压值,还包含PID算法程序,以及调整PWM占空比。可编程逻辑器件CPLD可直接生成PWM波控制开关管驱动器。
4.1 PWM波产生
PWM波的产生采用Verilog HDL硬件描述语言在CPLD中实现。信号频率设定为40 kHz,采用DDS方式步进频率可精确至1 Hz。使用QuartusⅡ自带的工具生成PLL器件,将外界晶体振荡器输入的频率倍频至100 MHz。由DDS公式,可得:
当键盘键入所需电压U0,单片机内转化为占空比DY=1一(Ui/U0)。累加器开始累加时输出高电平,当DY达到计数值时变为低电平,最终可得精确频率下占空比可调的PWM控制信号。
4.2 PI控制算法
为通过反馈调节控制信号实现稳压,系统软件设计中加入了PID控制算法,即单片机中将给定电压值与采样反馈电压值比较,利用偏差的比例、积分、微分线性组合调整PWM信号的占空比,进而达到稳压。常用的PID算法形式为:式中:KP、Ki、Kd分别为比例系数、积分系数、微分系数;e(k)为偏差;u(k)为所需控制信号的调整值。
该系统设计选择PI算法(PID算法的一种简单形式),即令Kd为零,只考虑比例系数和积分系数。因此,系统稳压控制的优劣取决于参数Kp、Ki。Kp越大,系统反应越灵敏,但Kp偏大会导致输出振荡大,调节时间延长,所以应谨慎选择。积分系数的运用可以消除系统的稳态误差,提高系统的控制精度。PI算法流程如图3所示。图3中引入了积分分离式算法,减少积分校正对控制系统动态性能的影响。即在控制开始阶段或电压值大幅度变化时,取消积分校正;而当实际电压值与设定值的误差小于一定值时,恢复积分校正作用。积分分离式算法既保持积分作用,又减小超调量,改善控制系统的性能。经实验确定,可实现稳压功能。

4.3 仿真验证
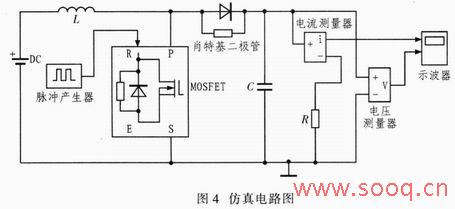
Simulink是MATLAB提供的实现动态系统建模仿真的一个软件包。采用powersystem库模型,将系统设计的仿真电路连接如图4所示。脉冲产生器产生固定频率和占空比方波,控制MOS开关管。电流和电压测量器将模拟的电流和电压量化送至示波器。仿真中器件参数根据实际设计选取:输入电压为18 V,开关管的控制脉冲(PWM波)频率为40 kHz,占空比60%,电容取2 200μF,电感为1 mH,电阻为18 Ω。得到的电流电压波形图如5所示。通过仿真可看出,在不考虑损耗时电压可以升36 V以上,电流也可以达到2.4A;在实际电路中因存在损耗,通过调整占空比达到了输出电压30~36 V步进调整.最大输出电流2 A。

5 结语
利用Boost电路实现了系统设计的升压转换,采用CPLD和单片机完成数字控制,软件编程得到PWM信号,通过调整占空比实现输出电压数字调节。而运用PI算法则是本系统设计的亮点,完美实现了宽输入,稳压输出。
声明:本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,也不构成任何其他建议。本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,不为其版权负责。如果您发现网站上所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容,以保证您的权益!联系电话:010-58612588 或 Email:editor@mmsonline.com.cn。

- 暂无反馈