基于Kinetix的三自由度运动控制实验装置
哈尔滨工业大学 罗克韦尔自动化实验室 李凤阁 叶雪荣 林景波 梁慧敏
摘要:研制了一种基于罗克韦尔自动化Kinetix集成运动控制系统的实验装置,能够实现对三自由度运动模型的精确定位控制。介绍实验装置的硬件组成,并以实现绘图仪功能为例说明软件设计和应用方法。
关键词:Kinetix 运动控制 SERCOS接口
1 引言
运动控制系统能实现精确的位置控制,速度控制,加速度控制,转矩控制以及这些被控量的综合控制 。随着工业自动化技术的发展,对运动控制系统的实时性和数据传输等方面的要求越来越高。为提高相关专业学生对运动控制系统的认识,哈工大罗克韦尔自动化实验室利用罗克韦尔自动化捐赠的Kinetix集成运动控制系统组件开发了一种三自由度运动控制实验装置,它把逻辑控制和运动控制结合在一起,在一个Kinetix平台上实现三轴的协调控制。
2 硬件构成
实验装置硬件结构如图1所示,由罗克韦尔自动化的Kinetix集成运动控制系统和机械执行装置构成。Kinetix系统是一个注重于完整的运动控制解决方案,由A-B ControlLogix可编程自动化控制器、SERCOS接口、数字式运动控制模块、A-B 伺服驱动器、电机和执行机构组成。其中的ControlLogix控制平台集成有8轴伺服运动模块,并通过抗干扰的SERCOS(串行实时通讯系统)光纤与伺服驱动器连接,避免了冗长的程序和杂乱的信号线,使系统具有高效、精确的运动控制能力。
2.1 控制系统
ControlLogix系统为顺序控制、过程控制、运动控制提供了一个统一的平台。可以在系统的一个1756机架中同时插入多个Logix55xx处理器,除顺序控制、过程控制指令外,处理器还有丰富的运动控制指令,这些指令支持各种运动功能,能够实现高度的集成操作及位置环和速度环的闭环控制,从而满足各种运动精度的要求。每个处理器都能实现多任务, 并通过机架背板的无源数据总线提供高速灵活的通信功能和强大的输入、输出功能;ControlLogix系统还提供50余种基于1756机架的通用数字量和模拟量I/O模块、通信模块和特殊功能模块。如图1所示本实验装置选用Logix5550(1756-L1)处理器作为控制系统的核心部件;通过数字量输入模块(1756-IB16)接收外部控制信号;通过Ethernet通信模块(1756-ENBT)实现与远程计算机的通信;系统的运动控制功能是由一个带SERCOS总线接口的8轴数字式运动控制模块,(1756-M08SE)来实现的。SERCOS是一种专门用于数字伺服和传动系统的现场总线接口和数据交换协议,能够实现工业控制计算机与数字伺服系统,传感器和可编程控制器I/O口之间的实时数据通信。
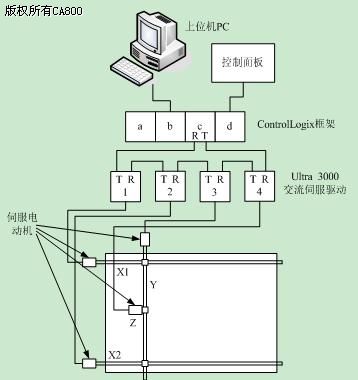
a: 1756-L1 b:1756-ENBT c: 1756-M08SE d:1756-IB16
图1 硬件结构图
2.2 驱动器和伺服电动机
装置采用采用带SERCOS接口的Ultra 3000(2098-DSD-005-SE)交流伺服驱动器,它提供从简单的独立伺服到多轴伺服集成控制系统的全面伺服驱动,使用220V单相交流电输入,连续输出峰值电流2.5A,输出功率0.5kW。可同时实现顺序控制及运动控制,完全满足多轴控制的要求。电机采用A-B的Y-系列低惯量无刷伺服电机(Y-1002-2-H),转子惯量低,加速度高,电机本身安装了光电编码器,带差动线驱动数据和换向信号,磁释放24VDC抱闸器,以保证位置精度。
2.3 机械结构
装置的机械部分由X(X1和X2)、Y、Z三个轴组成,每个轴都由伺服电机(动力装置)、通过联轴器与电机相连的丝杠(传动装置)和导向杆(导向装置)三部分构成,能够实现笛卡尔坐标系的X、Y、Z三个方向的运动。其中X轴固定于底座平台上,用X1、X2两个平行轴同步运动来增加机械负载能力;Y轴垂直于X轴,并固定在随X轴丝杠的旋转而沿X轴方向运动的两个滑块上,因此系统中X轴的运动是通过Y轴沿X轴的运动表现出来;Z轴垂直于由X轴和Y轴构成的平面,并整体固定在沿Y轴运动的滑块上,它表现出Y轴的运动方向;沿Z轴运动的滑块上装有一个夹具,可以用来固定画笔或刻刀等来模拟绘图仪或雕刻机等设备。这样综合控制X、Y、Z三轴电机的旋转即可实现在三自由度空间的定位。
3 硬件连接与运动控制的实现
与1756-L1处理器安装在同一机架上的运动控制模块通过其SERCOS接口的TX(接收端口)和RX(发送端口) 与四台伺服驱动器串接成一个通信回路,伺服驱动器经电缆与电机连接,实现对伺服电机的实时控制。实验装置要求既有3轴的独立运动,又有2或3轴的协调运动,这需要与其他I/O设备的逻辑控制结合才能实现。ControlLogix将逻辑控制与运动控制两者完美的结合在了一起,系统中的处理器既可以通过EtherNet 网络接口(1756-ENBT)模块接收上位计算机的命令,也可以直接接收控制面板的控制信号来对装置进行运动控制。
3.1 控制面板
在实验装置控制面板上的按钮与1756-IB16数字量输入模块接点连接,处理器根据这些按钮的状态,控制伺服电机的运动,从而实现简单的运动控制。启动和停止按钮控制伺服驱动器的使能和禁止;置零按钮可以将各轴当前位置设置为坐标原点;运动控制按钮使伺服装置按照预先编制好的轨迹运动。
3.2 上位机(PC)控制
采用上位机控制系统工作时,可以通过PC机上的人机界面向处理器发送启动、停止等命令,还可以设置电机速度。处理器根据上位机命令执行用户程序,控制伺服电机的运动。另一方面,电机的工作参数可通过编码器反馈给伺服驱动器,进而通过1756-M08SE模块和EtherNet接口模块传递给上位机,上位机可以以运行速度、加速度、以及角位移等形式显示在人机界面上,实时监控各轴的运动位置。系统中的PC机还可以用来配置系统参数、调试程序。
4. 软件设计
ControlLogix系统使用RSLogix5000 编程软件进行组态、编程和监控系统运行。该软件提供了完整的轴与驱动器配置及运动控制编程支持, 并具有凸轮/ 凸轮运动曲线编辑器,可通过图形界面产生并监视运动轨迹。只需简单地在处理器的梯形图程序中插入标准的运动控制指令就能完成运动控制的编程工作。下面以在实验装置上实现绘图仪的功能为例说明系统组态和编程方法。
4.1添加I/O模块和驱动器
ControlLogix系统中一个框架支持多个处理器,因此,即使系统中的1756模块与处理器在一个机架内,还需要用RSLogix5000软件的I/O配置功能将系统中所用的I/O模块以及与1756-M08SE8模块相连的4台Ultra3000伺服驱动器按照他们实际所在的机架槽号和节点号分配给系统中的处理器。为了编程方便将驱动器分别命名为“axis_x1-4”,节点号由硬件设置分别设置为1-4。
4.2 建立运动组
画笔的定位是三轴联动的结果,因此需要建立运动组(Motion Group)协调各轴运动。在4.1中添加的驱动器显示在RSLogix5000软件的“Ungrouped Axes” 目录下,说明还没有为驱动器及其相关轴定义所属的运动组。
在RSlogix5000配置运动组的属性对话框中自定义一个名字为MotionGroup的组,然后在分配轴(Axis Assignment)界面将四个运动轴指派给所建立的运动组。还要对运动组中的轴进行配置,在Units属性页中配置所用的单位,可以在inch,meter,mm之间选择,本系统一个坐标单位取1 mm;在Conversion属性页中配置电机每移动一个位置单位编码器的反馈点,既轴定位的类型,有Linear 和Rotary两种类型,Linear把反馈点数转换成移动的距离,Rotary把反馈的点数转换成旋转角度,为了直观地表示各轴的运动距离,这里选择“Linear”,同时选择单位计数次数为200000。在建立运动组时要注意设置适当的刷新频率,以保证运动任务执行的计算时间,在执行运动指令时,由标签监视位置,速度和加速度,传送到1756-MO8SE伺服模块中,还可以传送到处理器中,上位机监控系统的运行。
4.3 建立并配置三轴坐标系
坐标系的建立是三轴精确定位的基础,在运动组坐标系标签对话框中自定义名字为AB_XYZ。接着将为建好的坐标系添加运动轴:在坐标系的属性对话框中选择坐标系的维数为3,对应X1的Axis Name下拉选择axis_x,同理,X2和X3分别下拉选择axis_y, axis_z,完成坐标系的建立。
4.4 绘图仪控制程序设计
(1)运动控制指令
Logix55xx处理器有丰富的运动控制指令,包括用于调整/配置轴或者对伺服系统进行诊断检测的运动组态指令(Motion Configuration Instructions);提供专用事件检测(例如登录和监视位置)或清除错误功能的运动事件指令(Motion Event Instructions); 控制一组传动轴运动的传动组控制指令(Motion Group Instructions);控制传动轴位置的运动控制指令(Motion Move Instructions);能够直接控制或改变传动轴的运行状态的运动状态指令(Motion State Instructions);以及在笛卡尔坐标系中实行执行直线或圆弧运动的工具——运动坐标指令(Motion coordinated instructions),这些指令大大简化了运动控制的编程过程。
例如我们欲用实验装置绘制“Rockwell”字样就可以用运动坐标指令中的直线运动(Motion Coordinated Linear Move-MCLM)和圆弧运动(Motion Coordinated Circular Move-MCCM)两条指令来实现,这两条指令的特点是只需指定运动轨迹上关键的坐标、运动方向以及运动方式等参数而无需知道各轴在实现某段轨迹运动的过程中的动作分配,这样就简化了编程的工作。
MCCM指令梯形图符号如图2所示,它能够使运动控制系统在笛卡尔坐标系中执行圆弧移动,指令在本例绘图仪中应用的参数配置如下:
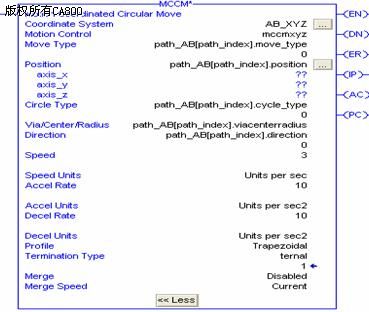
图2 MCCM指令梯形图符号
Coordinate System:定义为前面命名的AB_XYZ;
Motion Control:指令的标签,自定义为mccmxyz;
Move Type:指定运动方式,0为绝对坐标,1为增量位移,这里采用绝对增量的移动方式,即各轴以各自的速度,加速度和减速度,沿着圆弧轨迹向着确定的位置移动;
Position:指定运动组各轴的坐标,操作数是三维坐标系下一组序列,其下方显示的即为刚建立的坐标系的轴;
Circle Type:圆弧运动方式,指令定义了四种圆类型操作数:“Via”选择经过始点和终点之间的一个点;“Center”定义在序列数组中包含圆心;“Radius”序列数组中第一个数组含半径,“Centre Incremental”指via/center/radius数组定义了一个不断增长变化的圆心坐标,且这种变化与运动类行操作数无关。其操作数也是三维坐标系下的一组序列,本文采用第一种圆类型;
Via/Center/Radius:定义由Circle Type指定的点坐标或半径;
Direction:定义了运动方向,其具体参数值由具体的应用而定,在本例中其意义为在三维坐标系下以最短距离移动;
Speed:运动速度,可直接赋值或由标签定义,本例由立即数定义初值为3;
Speed Units:指定由Speed标定的值的单位,有在坐标系下直接定义每秒运动的单位(Units per sec)和根据最大速度的百分比定义(% of Maximum)两种选项,本例选择第一种方式;
Accel Rate:加速度值,可直接赋值或由标签定义;
Accel Units:设置Accel Rate标定的值的单位;
Decel Rate:减速度值,可直接复制或由标签定义;
Dccel Units:设置Decel Rate标定的值的单位;
Profile:设置速度变化方式,有Trapezoidal和S Curve两种选择,本例选择第一种。
Merge:定义是否将所有轴的运动转变为单一坐标系下运动,有Merge Disabled,Coordinated Motion,All Motion三种操作数,由于本系统只建了一个坐标系所以选取第一种操作数。
(2) 编写控制程序
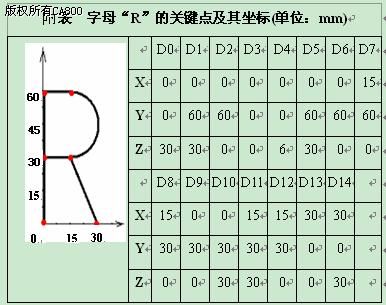
绘图仪要实现对“Rockwell”字样的绘制,首先要完成全局控制功能,包括伺服驱动器的使能与禁止、各轴电机的清错与复位等。画笔的运动实际上是按照人工分解的路径关键点运动的过程,是典型的顺序运动。本例为字母“R”选择的关键点及这些关键点所对应的坐标参见附表。
Logix55xx处理器支持自定义数据类型(或数据结构体),在编程之前首先自定义一个命名为 MOTION_PATH的数据结构题,用于按顺序保存各关键点的运行参数, 每个关键点都包含指令类型(Instruction Type)以及MCLM或MCCM指令所需的如Move Type, Circle Type, Direction, Position, ViaCenterRadius等参数的设置值。其中指令类型用于设置程序执行圆弧指令还是直线指令。程序流程如图3所示,在上电初始化时将画笔复位到起始点,并使能各运动轴。在程序执行时,可以通过依次调出关键点参数,顺序完成图形的绘制。
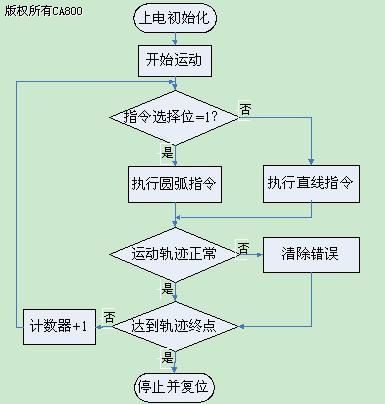
图3 系统程序流程图

图4 运动控制实验装置实物图
5 结束语
基于Kinetix的三自由度运动控制实验装置及其所绘制“Rockwell”字样如图4所示,它通过三个坐标轴的协调运动直观地展示运动控制的特点,学生只需编制简单的梯形图程序就能实现各种运动控制功能,能够在实验中对运动控制有更直观和深刻的理解。系统采用Kinetix集成运动控制系统大大简化了系统集成和调试,模块与驱动器之间的通讯连接使用光纤介质,确保可靠的具有良好抗干扰性的高速数据传送,提高了通讯速度以及驱动器和运动模块之间的互连性。
参考文献
[1] 李琰、徐殿国等,SERCOS接口应用技术研究[J].Servo Control,2006(9):20-22,26
[2] 丁金水,郁建平, 1756-M08SE 模块的多轴运动控制[J], 机械制造与自动化,2005,34(1):68-71,75
[3] 张君峰,ControlLogix和SERCOS系统结合应用[J],电气时代,2005,(08):54-55,57
[4] Rockwell AB Logix5550 Motion Instruction Set
[5] Rockwell AB RSLogix5000 Configuration and Programming
[6] Rockwell AB ControlLogix Reference Manual
[7] Rockwell AB1756-M08SE Installation Instruction
作者简介
李凤阁 (1967-)女 硕士/高级工程师。
声明:本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,也不构成任何其他建议。本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,不为其版权负责。如果您发现网站上所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容,以保证您的权益!联系电话:010-58612588 或 Email:editor@mmsonline.com.cn。

- 暂无反馈
